VJEPA: Probabilistic World Models
An overview of VJEPA, a new architecture that extends Joint Embedding architectures to support probabilistic beliefs and uncertainty for control without pixel reconstruction.Script
Current world models are stuck in a dilemma: they either waste capacity reconstructing noisy pixels, or they use deterministic embeddings that completely ignore safety-critical uncertainty. This paper proposes a solution that captures probabilistic beliefs without the heavy cost of generative reconstruction. The authors introduce VJEPA, a method to turn predictive architectures into formal probabilistic world models.
Let's explore why this gap exists. The researchers identify that while standard JEPA models avoid pixel reconstruction, their reliance on deterministic regression masks the true probability distribution of the future. This is a critical failure point for control tasks, where a planner needs to understand uncertainty, not just a single point prediction. Meanwhile, traditional generative models solve this effectively but force the system to learn high-entropy nuisances, like the texture of a wall, which are irrelevant for the task at hand.
To bridge this gap, the paper introduces a shift from point predictions to distributions. As you can see, standard JEPA relies on Mean Squared Error, which implicitly assumes a fixed-variance Gaussian and offers no mechanism for true belief propagation. VJEPA, on the right, learns a full predictive distribution in latent space. It uses a teacher-guided variational objective to maintain non-degenerate distributions, allowing the model to function as a proper latent dynamical system without needing to reconstruct pixels.
This probabilistic approach unlocks a powerful extension called Bayesian JEPA, or BJEPA. The authors demonstrate how they can separate the learning of world dynamics from specific task constraints using a Product of Experts framework. This separation allows for zero-shot transfer; you can learn the physics of the world once and then simply swap in different energy-based priors for new tasks. It essentially turns the latent space into a flexible environment for Model Predictive Control.
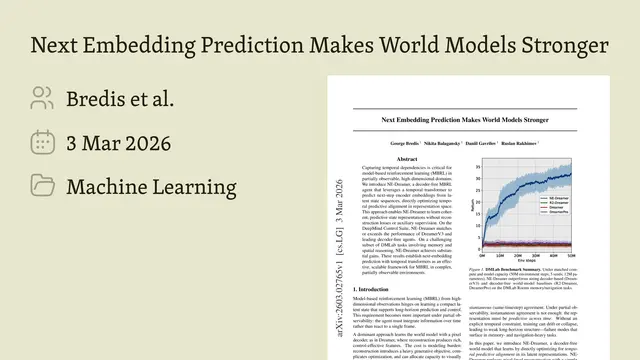
The practical impact of this architecture is highlighted in the 'Noisy TV' experiment. In this figure, the dashed lines representing Variational Autoencoders and autoregressive models attempt to reconstruct high-frequency noise, effectively getting distracted by the static. In contrast, the solid lines for VJEPA and BJEPA successfully ignore that noise, tracking only the stable, control-relevant signal on the black line. This confirms the model can discard nuisances while maintaining the signal necessary for accurate planning.
This work establishes that we do not need pixel-perfect reconstruction to build rigorous, probabilistic world models. By shifting the objective to variational prediction in latent space, the authors provide a path toward efficient, uncertainty-aware planning for autonomous agents. For more insights on the intersection of control theory and deep learning, visit EmergentMind.com.