V-JEPA 2.1: Unlocking Dense Features in Video Self-Supervised Learning
This presentation explores V-JEPA 2.1, a breakthrough architecture that achieves both high-fidelity dense spatial features and robust global understanding in self-supervised video learning. We examine how dense predictive loss, deep hierarchical supervision, and modality-specific tokenization unlock spatially and temporally consistent representations that excel across diverse applications from robotic manipulation to depth estimation, closing the long-standing gap between local and global video modeling.Script
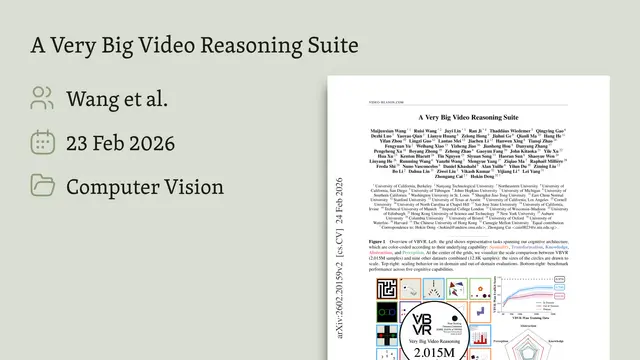
Most video AI models face an impossible choice: understand global actions or capture fine spatial detail, but never both. V-JEPA 2.1 shatters this trade-off, producing features so dense and consistent they can guide a robot arm to grasp objects while simultaneously predicting what a person will do 5 seconds from now.
Prior self-supervised video models hit a fundamental wall. V-JEPA 2 could tell you what action was happening, but its features were too aggregated to locate where. DINO gave you sharp spatial maps from images, but those maps fell apart the moment objects moved through time.
V-JEPA 2.1 solves this through four interconnected design principles.
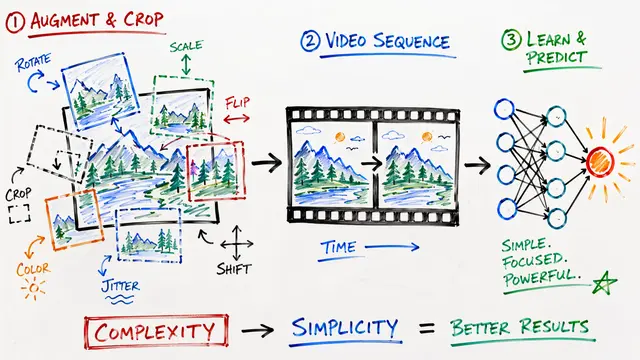
The first breakthrough is dense predictive loss: every token, not just masked regions, gets explicit spatial supervision. The second is deep self-supervision across intermediate layers, building structure at multiple scales. Third, modality-specific tokenizers handle images and video natively, eliminating inefficient pseudo-video tricks. Finally, they scale to 2 billion parameters on a massive mixed dataset.
The proof is in the features themselves. When you compute PCA on V-JEPA 2.1 patch embeddings, semantically similar regions across space and time collapse to the same color channels. Object boundaries stay sharp. Parts that belong together cluster together. And critically, these mappings hold stable as objects move through video frames, something previous models simply could not achieve.
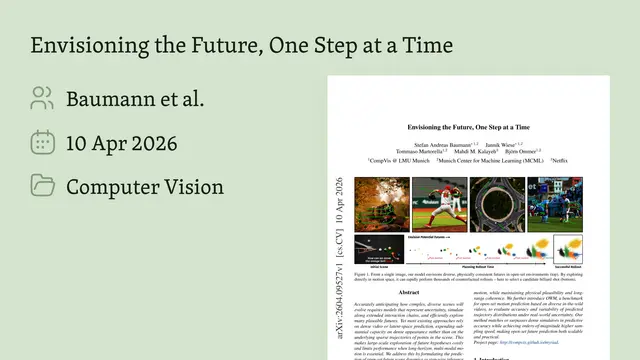
The applications are stunning. V-JEPA 2.1 predicts which object you'll interact with and when, outperforming all prior work. It guides robot arms to grasp objects in cluttered scenes with 20% better success. It estimates depth more accurately than models 3 times its size, and generates navigation trajectories 10 times faster than latent world models.
V-JEPA 2.1 proves that architectural design, not just scale, unlocks the dense spatiotemporal features needed for true physical world understanding. To explore more research like this and create your own video presentations, visit EmergentMind.com.