- The paper presents a novel method that leverages 3D point clouds and keypoint sampling to estimate object pose distributions, effectively addressing reflection and revolution uncertainties in bin picking tasks.
- The approach utilizes a DGCNN-based encoder and InfoNCE loss for robust feature extraction and scoring, achieving 100% precision in avoiding ambiguous predictions under industrial conditions.
- The method's real-time adaptability and robustness in handling visual ambiguities promise significant advancements in automated manufacturing and reliable bin picking applications.
Object Pose Distribution Estimation for Point Clouds
Introduction
The paper "Object Pose Distribution Estimation for Determining Revolution and Reflection Uncertainty in Point Clouds" (2512.07211) presents a novel approach to object pose estimation that addresses the challenge of pose uncertainty in industrial settings. Traditional object pose estimation techniques focus on delivering a single-pose estimate, which falls short in scenarios characterized by visual ambiguities often seen in cylindrical objects common in manufacturing contexts. The proposed method innovates by estimating pose distribution using 3D point cloud data devoid of RGB information, thereby isolating pose estimation from lighting and color inconsistencies prevalent in industrial environments.
The method leverages a neural network architecture inspired by SpyroPose, employing keypoint feature extraction and aggregation to compute likelihoods of pose estimates. It introduces a focus on the ambiguity in reflection and revolution, prevalent due to inherent object symmetry, and validates its approach in a bin picking scenario, emphasizing robustness and reliability by avoiding incorrect grasps.
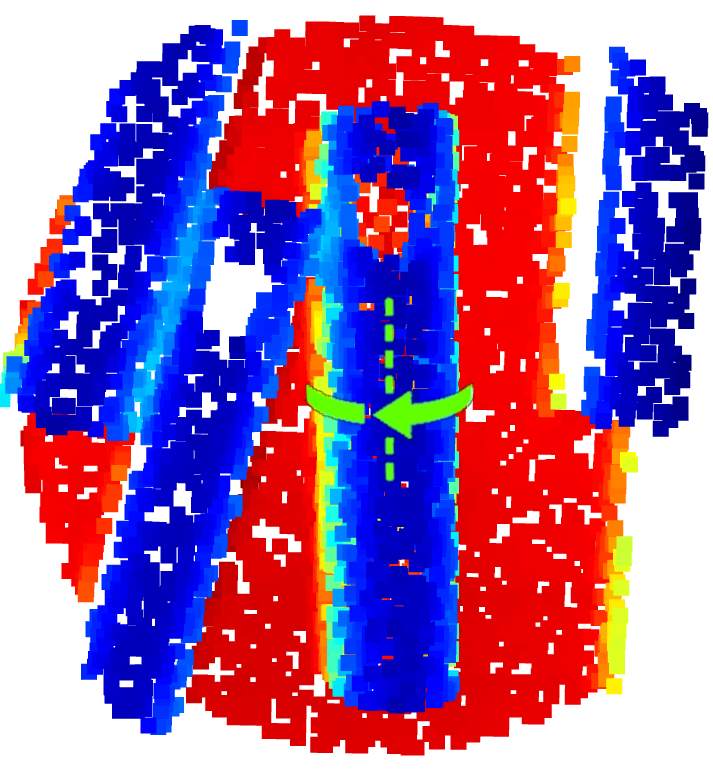
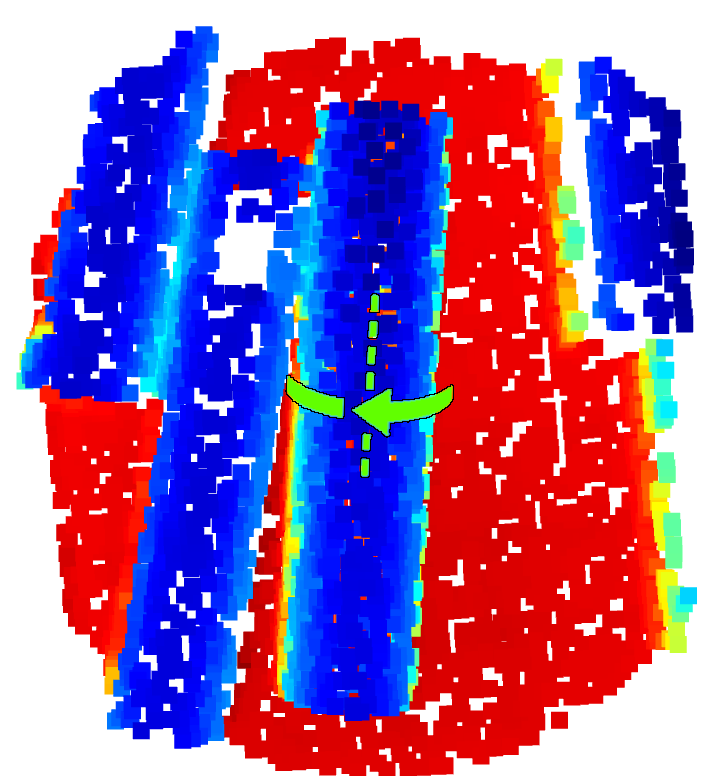
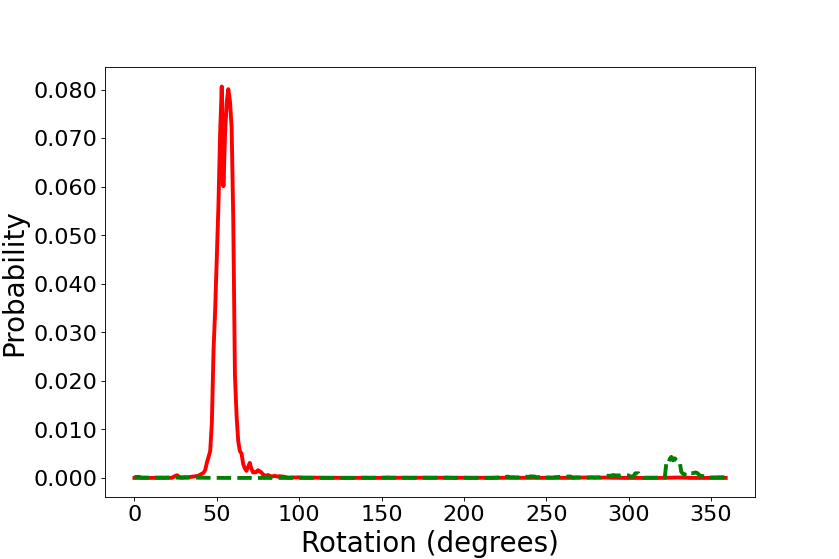
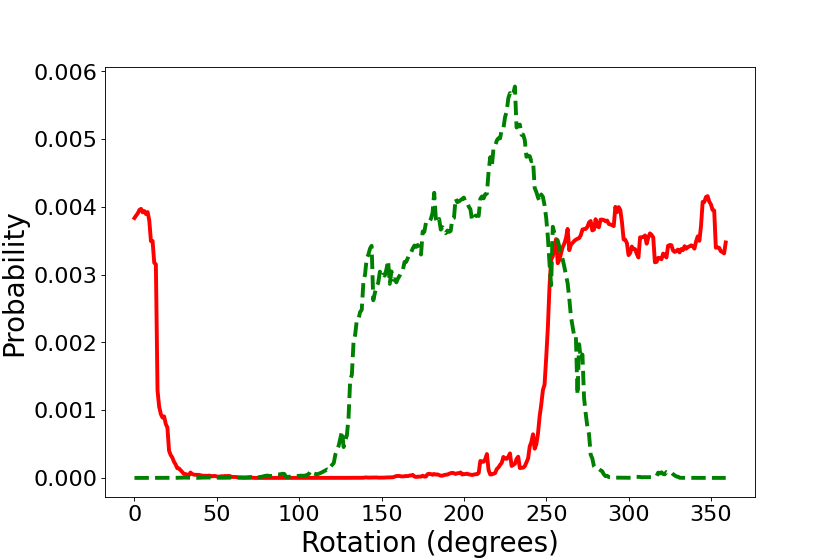
Figure 1: The pose distribution estimate of our method is shown for both unambiguous and ambiguous views.
Methodology
The core architecture consists of a feature encoder, keypoint feature extractor, and a Multi-Layer Perceptron (MLP) for scoring, designed to accommodate 3D point cloud data. The approach involves sampling keypoints from a CAD model using farthest point sampling, which remains consistent through training and testing phases. The feature encoding utilizes a PointNet-like structure, specifically Dynamic Graph CNN (DGCNN), for its adeptness in handling point cloud data.
From the encoded scene, keypoints are sampled by identifying the nearest neighbor within a 3D point cloud. These keypoints, transformed by sample rotations, form the basis for a comprehensive pose distribution. The model is trained using InfoNCE loss and optimized using ADAM, incorporating data augmentation strategies to simulate real-world depth and positional variances.
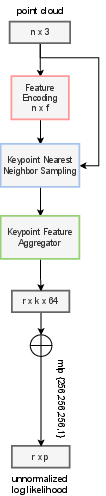
Figure 2: The structure of the developed network.
Experimental Setup and Results
The experimental validation involves synthetic data generated through BlenderProc, with constraints ensuring visibility to hypothesize stable grasps. The method yields a precision of 100% in avoiding predictions within ambiguous views, albeit with varying coverage between objects due to inherent occlusions.
For real bin data, the system originally relied on depth checks and fixtures for pose verification; however, the proposed method demonstrates significant improvement in precision and recall, achieving 100% precision across assessed tasks. The setup results surpassed the performance of traditional systems, effectively eliminating the need for additional hardware verification, thus enabling flexible and robust operations in industrial setups.
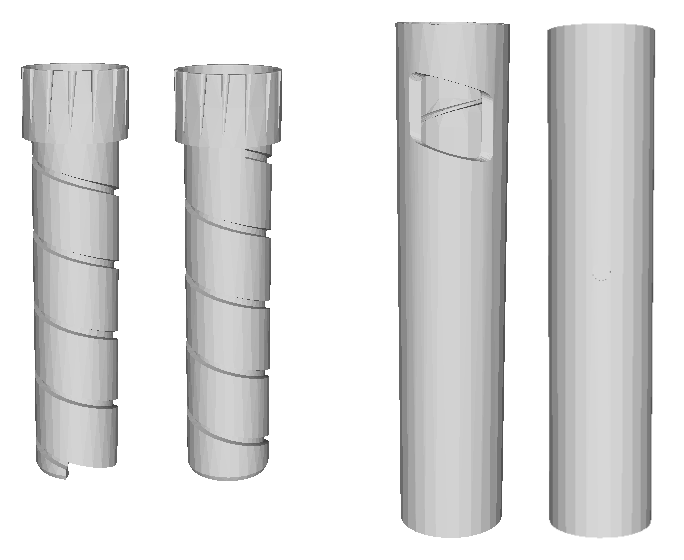
Figure 3: Front and back views of the two objects from our experiments.
Discussion on Practical Implications
The paper's contributions extend to practical application in manufacturing environments, emphasizing object pose reliability and error-free task execution in bin picking scenarios. With the potential to integrate additive manufacturing setups seamlessly, the proposed method allows for real-time processing and adaptive system configurations. Additionally, this approach paves the way for enhanced robustness in scenarios involving novel objects or designs, readily accommodating the transformations towards decentralized and customized manufacturing systems.
Through the comprehensive estimation of revolution and reflection uncertainties, the framework equips robotic systems with the ability to handle visual ambiguities autonomously, reducing the reliance on engineered solutions and facilitating advancements in automated assembly lines.
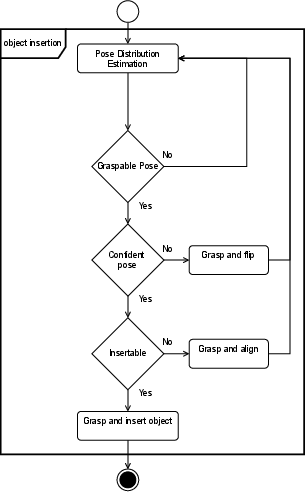
Figure 4: Activity diagram of the bin picking process using confidence intervals.
Conclusion and Future Work
The paper provides a foundation for estimating object pose distributions in 3D point clouds, specifically addressing uncertainties in reflection and revolution. The proven precision and adaptive potential of the method in bin picking applications underscore its significance. Future research could extend the system to SE(3) distributions, exploring full 6 DoF pose uncertainties and testing variations across benchmark datasets. Further explorations may include employing different feature encoders or integrating color information for a multi-modal approach.

