Teaching Robots to Feel: Force-Based Learning for Dexterous Manipulation
This presentation explores a breakthrough in robotic tactile sensing that addresses the challenge of learning from high-dimensional 3D touch data. The researchers introduce a canonical representation that standardizes tactile features across different sensors and a force-based self-supervised pretraining method that captures both local contact forces and net force dynamics. Validated on four complex real-world tasks including opening boxes, reorienting objects, flipping caps, and assembling parts, this approach achieves a 78% average success rate, demonstrating how better tactile understanding enables robots to perform delicate, contact-rich manipulation in human environments.Script
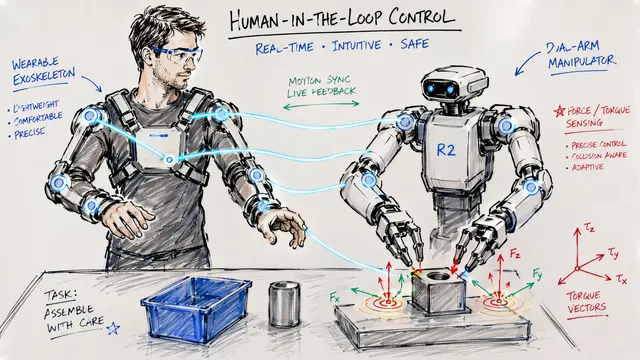
Robots that work alongside humans need dexterous hands, but there's a hidden bottleneck: teaching them to feel. High-dimensional tactile sensor data creates a learning nightmare, with hundreds of contact points generating information that's hard to process and impossible to standardize across different sensors.
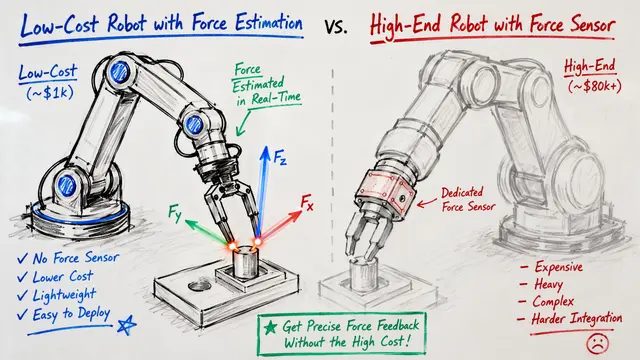
The core problem isn't the sensors themselves, it's what they produce. Each tactile array generates hundreds of data points, and worse, there's no common language between sensor types. A robot trained on one system can't transfer that knowledge to another, and existing methods struggle to capture the relationship between individual contact points and the net forces acting on an object.
The researchers tackle both problems at once with a two-part innovation.
First, the canonical representation transforms sensor-specific features into a universal coordinate system, making tactile data portable and compact. Second, the force-based pretraining task works in two stages: it randomly masks portions of the tactile data and trains the system to predict missing local forces, then uses those predictions to calculate the net force acting on the hand. This dual objective forces the model to understand both fine-grained contact mechanics and global force balance.
The training pipeline shows how this works in practice. During pretraining on unstructured play data, portions of the tactile sensor array are randomly masked out. The encoder learns to predict these missing local forces by reasoning about neighboring contact points. Then, those predictions get substituted back into the full sensor array, and the same encoder predicts the net force vector. This self-supervised task requires no manual labeling, just raw interaction data. Once pretrained, the encoder plugs directly into an imitation learning framework for downstream manipulation tasks.
When tested on four challenging real-world tasks, the system achieved a 78% average success rate. These weren't simple pick-and-place operations but genuinely difficult contact-rich scenarios: prying open hinged boxes, reorienting objects mid-grasp, flipping bottle caps with precise finger movements, and assembling parts that require coordinated force control. That success rate represents a meaningful step toward robots that can handle the delicate, force-sensitive tasks humans perform naturally.
High-dimensional tactile data was the bottleneck, but by giving robots a universal language for touch and teaching them to reason about forces before they ever see a specific task, the researchers turned feeling into something learnable. Visit EmergentMind.com to explore this work further and create your own research videos.