- The paper introduces a hybrid BNKF that integrates a variational Bayesian neural network with Kalman correction to handle complex, nonlinear UAV dynamics in degraded sensing environments.
- It leverages offline learned nonlinear dynamics and explicit uncertainty propagation to deliver real-time state estimation with improved accuracy and robust noise handling.
- Experiments demonstrate BNKF outperforms traditional EKF and UKF methods, reducing mean estimation error and uncertainty even under high noise and sparse data conditions.
Neural Aided Kalman Filtering for UAV State Estimation in Degraded Sensing Environments
Introduction and Motivation
The paper "Neural Aided Kalman Filtering for UAV State Estimation in Degraded Sensing Environments" (2604.28107) addresses the deficiencies of classical Kalman filter (KF) variants in scenarios with highly nonlinear dynamics, sparse sensor data, and elevated measurement noise. These factors are prevalent in UAV tracking tasks, particularly against adversarial or unpredictable targets, where conventional Extended (EKF) and Unscented Kalman Filters (UKF) fail to deliver robust state estimation due to their limited capacity for modeling complicated control-induced nonlinearity and their inflexible noise handling.
The authors propose the Bayesian Neural Kalman Filter (BNKF), which integrates a variational Bayesian Neural Network (BNN) as the prediction engine with a standard Kalman filter correction step. The BNKF architecture leverages offline-learned nonlinear dynamics and explicitly propagates predictive uncertainty from the BNN into the Kalman update, providing principled uncertainty quantification. The framework is designed for real-time deployment and is evaluated against EKF and UKF baselines under systematically varied radar sensor noise and limited sampling conditions.
Data Generation and Sensing Regimes
The experimental setup employs the Synthetic-UAV-Flight-Trajectories dataset, featuring thousands of high-fidelity, nonlinear 3D UAV trajectories generated using Gazebo. Each trajectory consists of timestamped position and velocity vectors representing ground truth. To replicate realistic degraded sensing, radar measurements (range, range-rate, bearing, elevation) are simulated with additive Gaussian noise via the Stone Soup library, with sensor noise levels stratified into low, medium, and high bins.
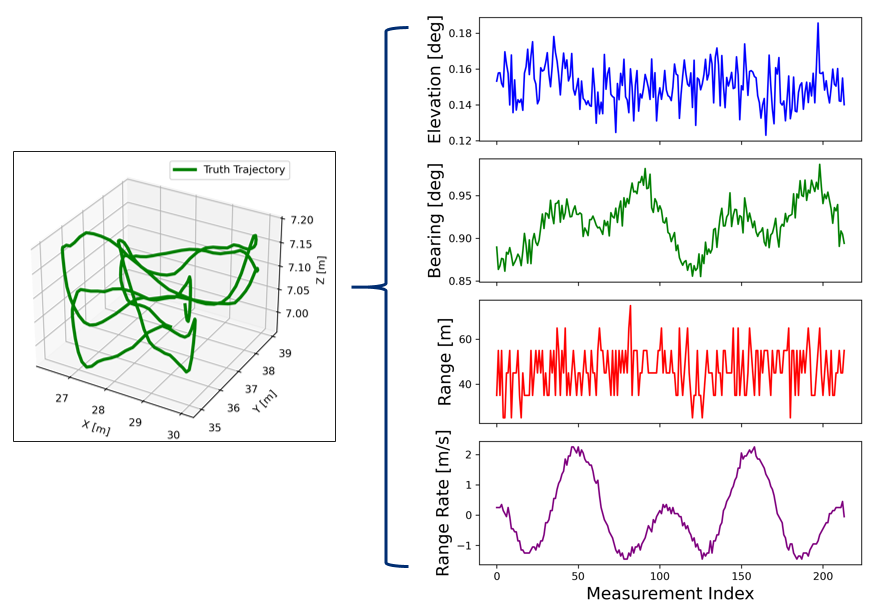
Figure 1: Simulated radar sensor measurement generation illustrating ground truth and synthetic noisy observations.
The sampling rate is varied to mimic observation sparsity, with test cases at 100%, 75%, and 50% retained measurements. This reflects operational environments where data is intermittently missing or degraded due to external interference.
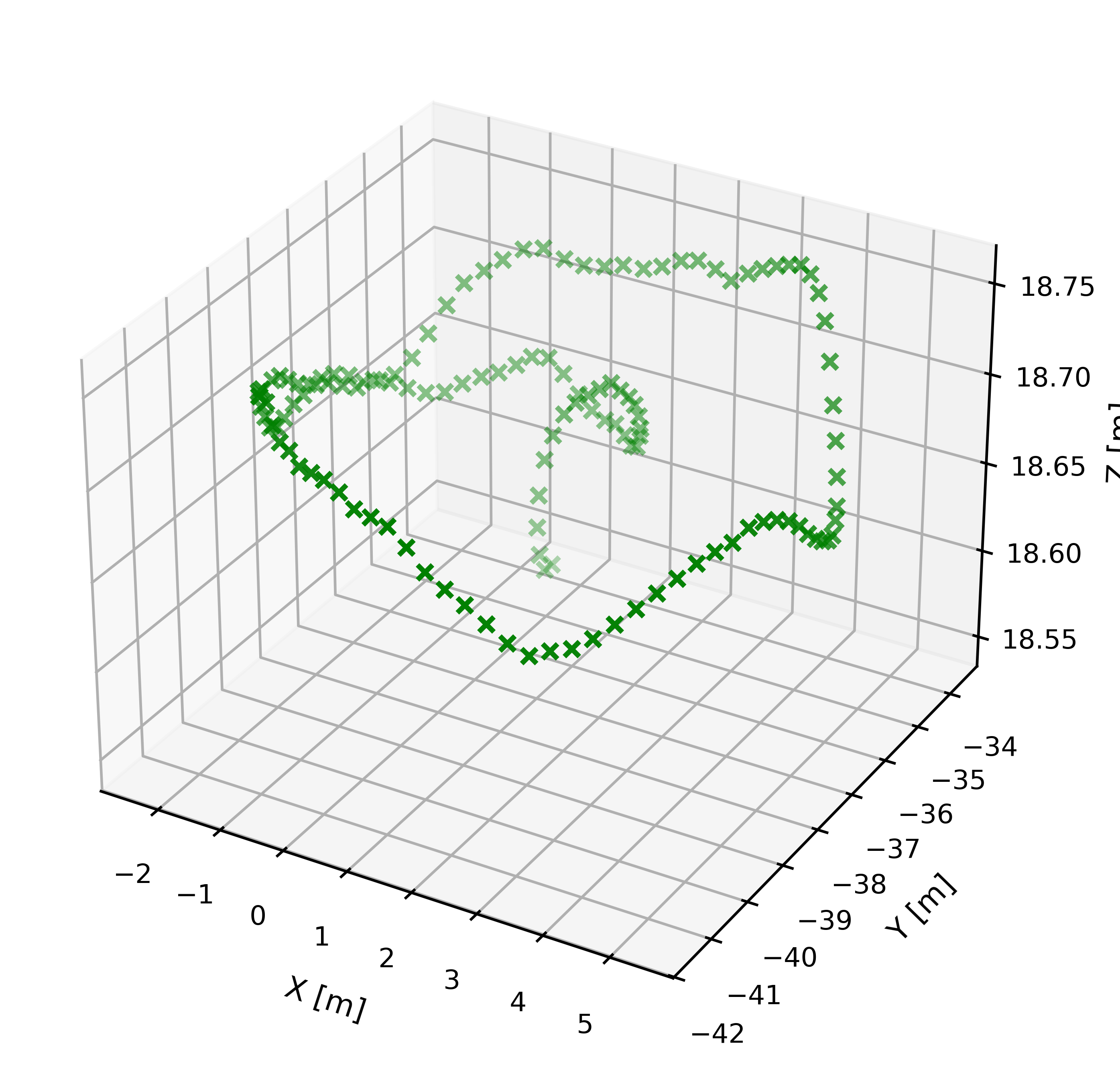
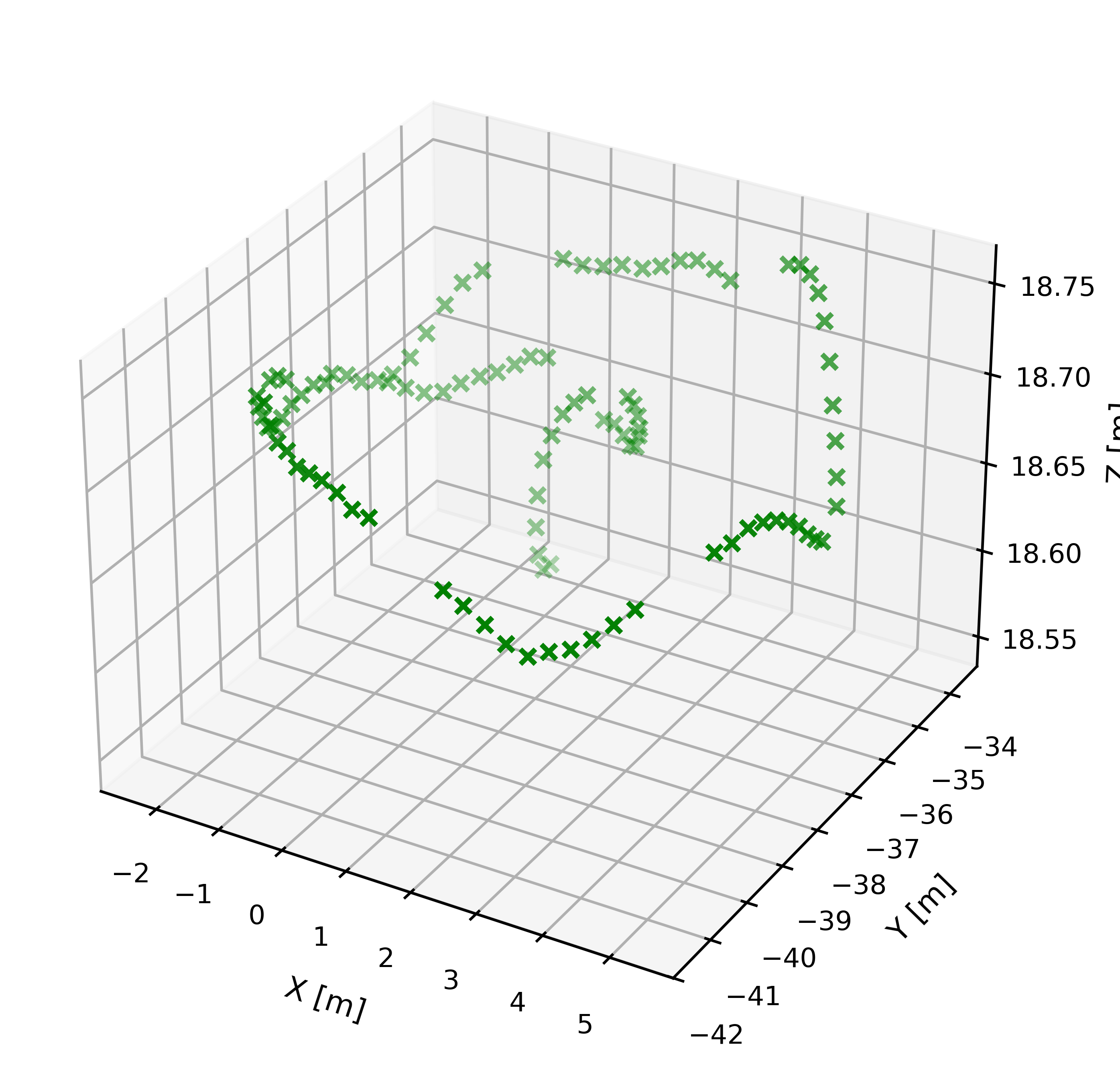
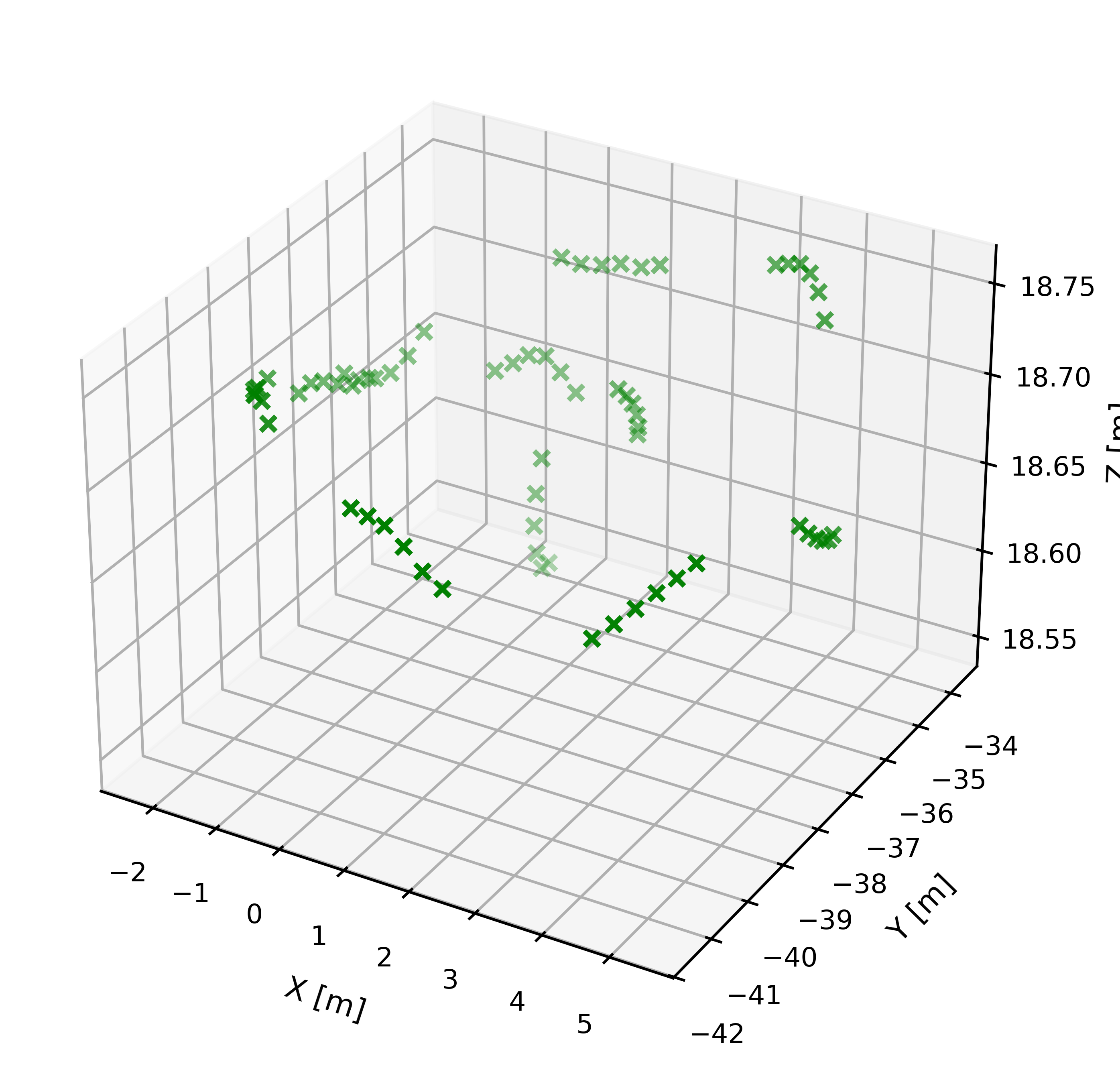
Figure 2: Trajectory visualization at full sampling rate (1.0 SR) depicting a typical nonlinear UAV flight path.
Algorithmic Approaches
Baseline Methods: EKF and UKF
The EKF implements prediction and correction on nonlinear measurements transformed bi-directionally between Cartesian and sensor space via local Jacobian linearization. Its performance is limited by sensitivity to process noise modeling and discrete linearization errors under strong nonlinearity or high measurement noise.
The UKF propagates sigma points through nonlinear transition and observation mappings, yielding improved, non-linear state and covariance estimation over the EKF. However, the UKF's robustness also degrades in the presence of rising measurement uncertainty, especially when underlying control dynamics remain unknown.
Bayesian Neural Kalman Filter (BNKF) Framework
A variational BNN forms the predictive backbone, mapping historical noisy sensor measurements to probabilistic state estimates (mean and covariance). During inference, the BNN outputs are sampled via Monte Carlo to capture epistemic uncertainty. This output feeds into the Kalman filter's correction step, where both predictive mean and uncertainty inform the update—enabling dynamic adaptation to measurement noise and trajectory nonlinearity.
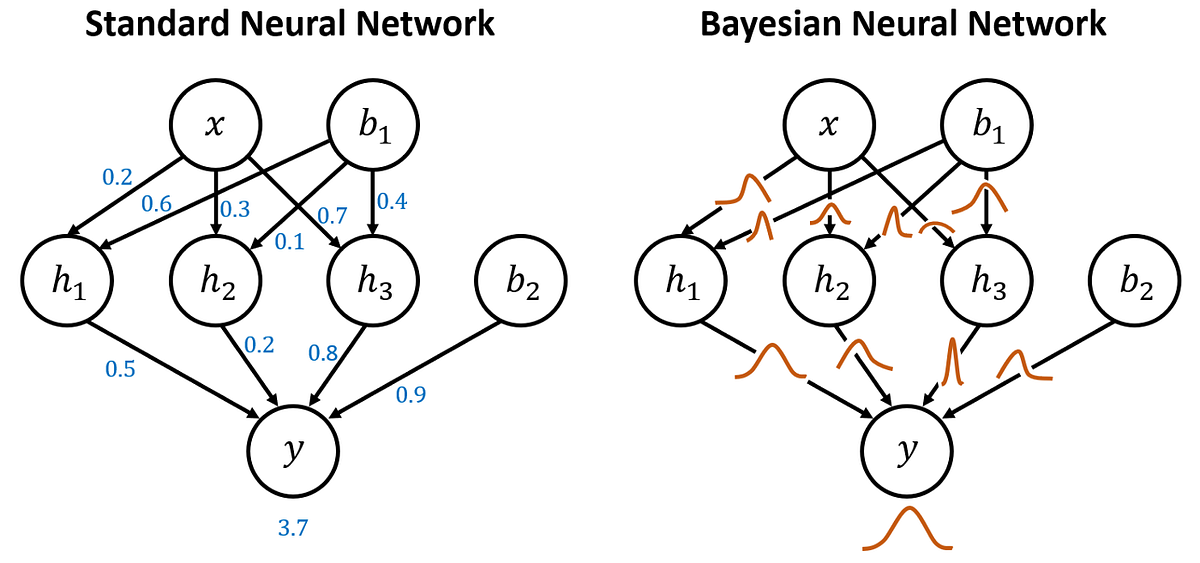
Figure 3: Comparison between a conventional neural network (NN) and a Bayesian Neural Network (BNN), highlighting uncertainty modeling.
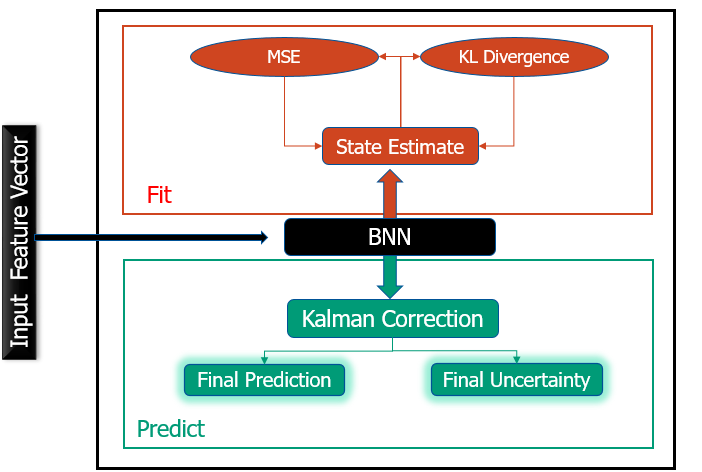
Figure 4: BNKF process flow showing integration of BNN prediction and Kalman correction with explicit uncertainty propagation.
Ensemble Variant (BNKFe)
The BNKFe ensemble variant decouples the 3D state estimation problem into three independent BNNs for x, y, and z, which are subsequently recombined. This architecture yields reduced prediction uncertainty and maintains accuracy, especially under high-noise, sparse-data regimes.
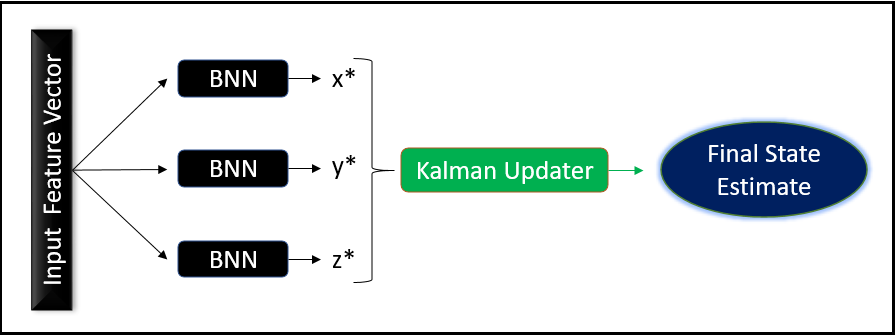
Figure 5: BNKFe process flow visualizing independent axis-wise BNN prediction and subsequent fusion in the Kalman correction.
Evaluation Methodology
Performance metrics are chosen to jointly evaluate accuracy and confidence:
- Euclidean Distance (ED): Quantifies average state estimation error.
- Determinant (Det): Measures output uncertainty, derived from predicted covariance.
- Mahalanobis Distance (MD): Assesses truth point containment within predicted uncertainty ellipsoids.
Experiments target three noise regimes, with downsampled sensor data, across roughly 15,000 trajectories per testset. Neural methods use five-fold cross-validation for statistical robustness. Inference times are measured for practical deployment feasibility.
Results
BNKF demonstrates superior accuracy and containment in medium to high noise conditions relative to EKF and UKF. The ensemble variant BNKFe further lowers uncertainty and sustains accuracy. Both hybrid models outperform standalone BNNs, emphasizing the correction step’s importance.
- In low-noise, classical KFs perform optimally, but BNKF remains competitive.
- In mid/high-noise, BNKF achieves a mean ED of 8.63m, compared to 35.16m (EKF) and 66.78m (UKF).
- BNKF maintains well-calibrated uncertainty; MD values are closest to expected state dimension.
- Inference runtime analysis shows BNKF is efficient, suitable for real-time deployment once trained.
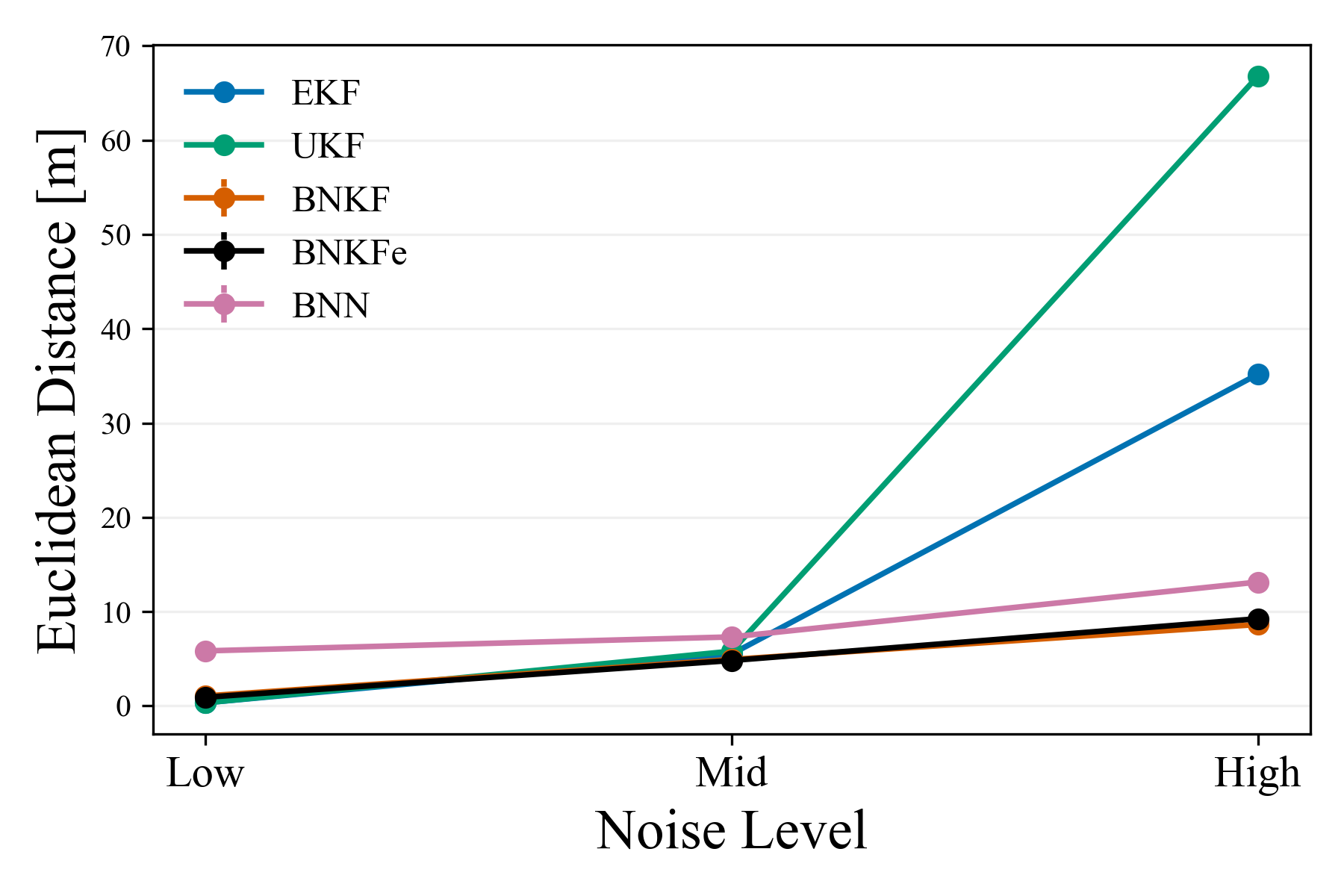
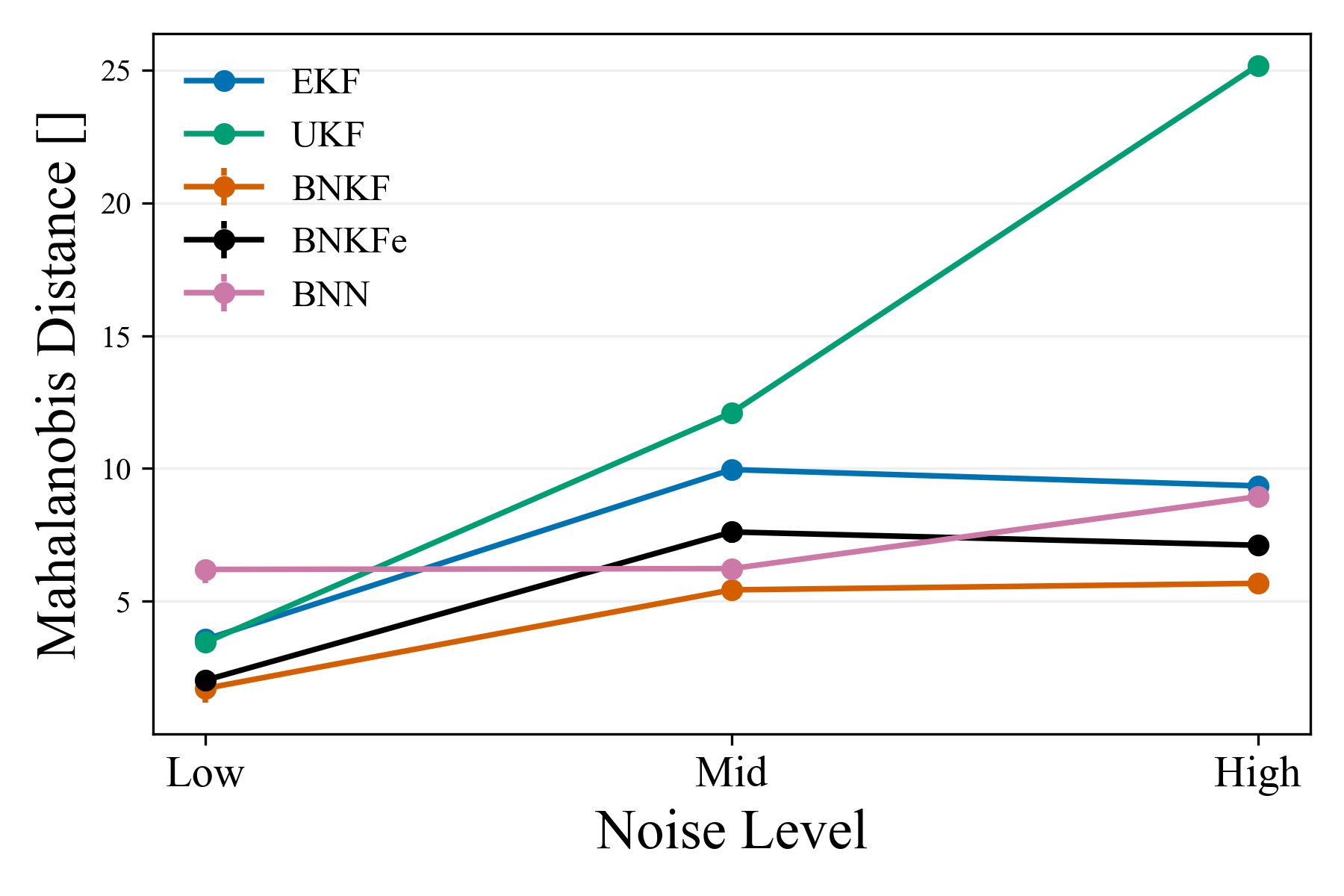
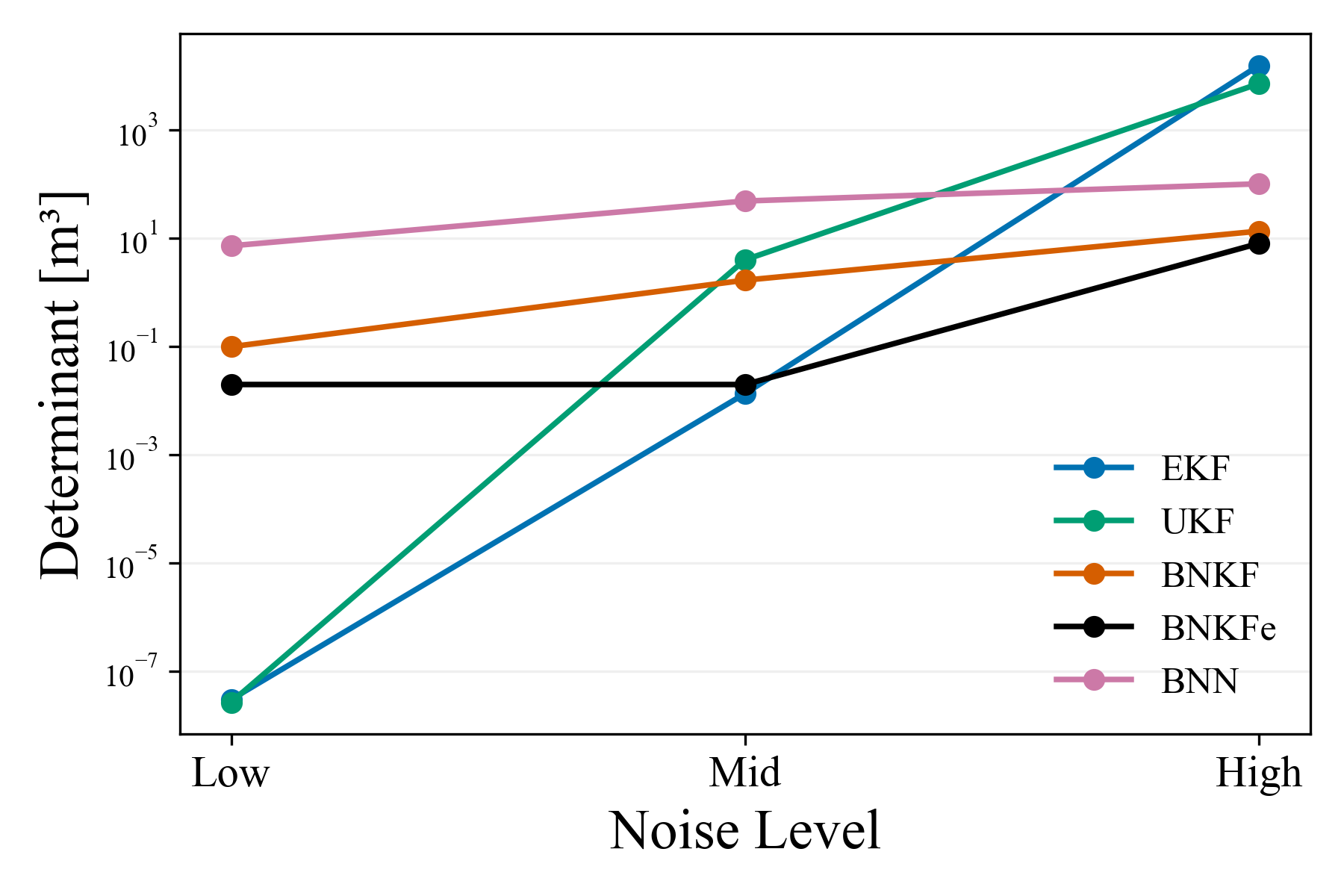
Figure 6: ED comparison showing BNKF’s accuracy advantage over EKF/UKF across noise regimes.
Discussion and Implications
The BNKF architecture’s principal advantage lies in its capacity to adaptively propagate both predictive uncertainty and nonlinear dynamics learned from historical data, directly into online filtering. This enables robust state estimation under conditions where conventional analytic models fail—such as severe sensor noise, unknown control policy, or intermittent observations. The ensemble approach mitigates prediction variance and offers improved containment without sacrificing real-time viability.
This methodology bridges the strengths of data-driven neural estimators and principled statistical filters, presenting a scalable solution for state estimation in aerospace, robotics, and any domain characterized by adversarial or degraded sensing environments. Practically, the approach is readily deployable for tracking agile platforms and informs future hybrid estimator design in autonomous systems.
Conclusion
The paper delivers a rigorous evaluation of the BNKF and BNKFe hybrid state estimators for UAV tracking under challenging sensing conditions. The results establish the models’ superiority in accuracy, uncertainty quantification, and containment at elevated noise and missing data rates. The hybrid framework demonstrates strong potential for applications demanding robust online state estimation with principled uncertainty handling, setting a foundation for continued research at the intersection of deep learning and statistical filtering.

