- The paper's primary contribution is the development of a unified MPC framework that integrates continuous flows and discrete jumps via a set-valued hybrid prediction horizon.
- It establishes theoretical guarantees including recursive feasibility and asymptotic stability through hybrid Bellman inequalities and Lyapunov-like conditions.
- Numerical examples, such as the controlled bouncing ball, demonstrate the framework's practical utility in addressing complex cyber-physical and robotic control challenges.
Model Predictive Control for Hybrid Dynamical Systems
Introduction and Motivation
The paper "Model Predictive Control of Hybrid Dynamical Systems" (2604.21989) develops a rigorous theoretical framework for applying Model Predictive Control (MPC) to hybrid dynamical systems, in which continuous evolutions (flows) and discrete transitions (jumps) interplay in general, potentially nonlinear and constrained state space settings. The work addresses longstanding gaps in the MPC literature, which traditionally focused on purely continuous or discrete systems, or on particular hybrid models such as mixed logical dynamical (MLD) systems and switched/impulsive systems relying on discrete logic or mixed-integer optimization techniques. By leveraging the general hybrid systems formalism (hybrid inclusions/equations), the authors provide a unified optimization-based control framework that can address flows, jumps, and their constraints within a single MPC recursion, incorporating hybrid time domains directly into prediction and implementation.
Hybrid Plant and Solution Concept
The hybrid plant is modeled as a system described by a flow set, flow map, jump set, and jump map:
$\HS :
\left\{
\begin{aligned}
\dot{x} &= f(x,u) & (x,u)\in C \
x^+ &= g(x,u) & (x,u)\in D
\end{aligned}
\right.$
where x∈Rn, u∈Rm, and hybrid time domains parametrize both ordinary time and discrete jumps. The solution concept ensures well-posedness and uniqueness by enforcing regularity on the data, with technical assumptions on the closure of the flow set and local uniqueness for the flows. The framework supports highly general hybrid phenomena, such as impulsive and event/self-triggered control, timer resets, and asynchronous updates.
Hybrid Prediction Horizon
A central innovation is the adoption of a set-valued hybrid prediction horizon T⊂R≥0×N, which encodes allowable combinations of flow time and number of jumps in the finite-horizon optimal control problem. Unlike the fixed step or time-driven receding horizon in classical MPC, the hybrid prediction horizon is purposely designed to maximize feasibility and recursiveness in the presence of non-uniform hybrid time domains:
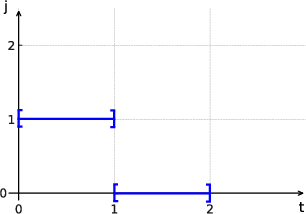
Figure 1: Hybrid prediction horizon for J=1, t0=2, t1=1, t2=0, allowing both flow time and jumps in prediction.
This structure enables the optimal control problem (OCP) to generate feasible predictions for every maximal hybrid trajectory, capturing Zeno-like and persistent-jump/flow behaviors naturally encountered in hybrid systems.
Cost Functional, Constraints, and Value Function
The OCP considered in each MPC iteration is to minimize a hybrid cost functional: J(x,u)=j=0∑J∫tjtj+1LC(x(t,j),u(t,j))dt+j=0∑J−1LD(x(tj+1,j),u(tj+1,j))+V(x(T,J))
where LC, x∈Rn0 are positive definite or semi-definite stage costs for flows and jumps, and x∈Rn1 is a terminal cost. Terminal constraints are enforced by requiring the terminal state to lie in a designated set x∈Rn2. The minimization is recursed on feasible solutions with initial condition x∈Rn3, terminal time x∈Rn4, and terminal state x∈Rn5.
The hybrid MPC value function x∈Rn6 is defined as the infimum of cost over all feasible solution pairs to the hybrid plant and forms the basis for Lyapunov-type stability proofs.
Structural Properties and Theoretical Results
Recursive Feasibility and Structural Invariance
The paper establishes that, under suitable invariance and completeness properties for the terminal set x∈Rn7 under appropriately chosen static state-feedback, recursive feasibility of the OCP is ensured. If x∈Rn8 is forward invariant for the closed-loop hybrid system, every terminal point after one OCP iteration lies in the feasible set for the next. This is a key generalization of the recursive feasibility property in conventional MPC, extended to hybrid time domains and state constraints.
Non-trivial Receding Horizon Execution
A distinct receding horizon implementation for the hybrid setting is proposed, in which both the prediction horizon and the control application period can be hybrid (set-valued):
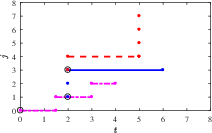
Figure 2: Hybrid time domains of piecewise optimal trajectories and receding horizon MPC events for a case with x∈Rn9.
This accounts for the fact that a natural and effective prediction/control step in a hybrid system may occur either after some flow time or after some jumps, without being locked to time-driven sampling.
The concatenation of optimal segments gives the constructed closed-loop hybrid trajectory:
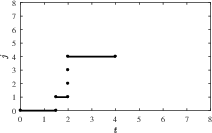
Figure 3: Hybrid time domain of the overall closed-loop trajectory—concatenation of optimal predicted arcs.
Asymptotic Stability and Value Function Descent
The main theoretical contribution is a set of sufficient, checkable conditions for asymptotic stability of a closed set u∈Rm0 under the hybrid MPC algorithm. The authors prove that if flow/jump costs, terminal cost, and terminal feedbacks satisfy Lyapunov-like inequalities—extending traditional Control Lyapunov Function (CLF) and MPC terminal set arguments to hybrid inclusions—then the value function is positive definite and strictly decreases along closed-loop trajectories, modulo possible persistent flows or jumps. Several alternative cases are considered, depending on whether solution pairs exhibit persistent jumps, persistent flows, or general alternating hybrid behaviors.
Technically, the paper obtains:
- Explicit bounds on the value function illustrating descent via hybrid Bellman inequalities.
- General conditions under which u∈Rm1 is class u∈Rm2-lower bounded in distance to the target set.
- Robustness to cases where either the flow or jump cost may be degenerate (e.g., zero), as long as persistence of the other hybrid behavior is guaranteed.
By linking the decrease of the value function with hybrid time evolution, the paper provides Lyapunov-based certifications for the asymptotic stabilization of sets—a key technical leap beyond the switched or logic-based hybrid MPC literature.
Numerical Illustrations and Examples
The framework is explicitly illustrated in several canonical hybrid control problems—including a controlled bouncing ball system (impulsive mechanics) and a sample-and-hold control system (periodic logic-driven switching). The examples demonstrate:
- Construction of hybrid prediction horizons tailored to system dynamics;
- Design of suitable flow/jump/terminal costs and terminal sets;
- Implementation of the hybrid MPC recursion along hybrid time domains, with numerically computed trajectories converging as predicted.
The results confirm that the structural and stability guarantees rigorously derived in the theoretical sections are effective in practice, and can be implemented using available optimal control solvers, hybrid simulation toolboxes, and by leveraging hybrid system reachability/optimization theory.
Implications, Limitations, and Future Perspectives
The paper's formalization of hybrid MPC within a general hybrid systems framework fills a critical methodological gap for real-world cyber-physical, robotic, and networked control applications that naturally combine continuous and discrete dynamics. It unifies prior approaches based on mixed-integer programming (MLD, PWA), impulsive/sampled-data MPC, and switched systems, while extending applicability to systems with richer hybrid phenomena (state resets, asynchronous logic, Zeno behaviors).
Practically, the results provide:
- A blueprint for constructing feasible/stabilizing hybrid MPC schemes, even for hybrid plants with complex temporal structures;
- A foundation for integrating modern MPC developments, such as economic or dissipativity-based costs, set invariance/safety constraints, and temporal logic specifications (see [273, 292]);
- Tools for certifiable hybrid control in challenging settings, including safety-critical and resource-constrained embedded environments.
The authors note that practical computation of optimal solutions for the presented hybrid OCP remains challenging, especially for high-dimensional or nonconvex settings. Extensions to robust and output feedback hybrid MPC, incorporation of learning-based/predictive elements, and development of efficient solvers for hybrid optimal control are suggested as fruitful research directions.
Conclusion
The work provides a mathematically rigorous control-theoretic foundation for MPC of hybrid dynamical systems, addressing key structural, recursive, and stability challenges via explicit hybrid time domain constructs, value function analysis, and invariance conditions. The proposed framework significantly broadens the class of systems amenable to MPC by supporting general hybrid behaviors and by offering a pathway for further theoretical and algorithmic advances in hybrid optimal and predictive control theory.
References:
"Model Predictive Control of Hybrid Dynamical Systems" (2604.21989).