- The paper presents a predictive, constraint-aware UAV shepherding strategy using candidate sampling to navigate swarm dynamics.
- It integrates bio-inspired models with cohesion, separation, alignment, and evasion to maintain group integrity under real-world kinematic limits.
- Simulation results demonstrate efficient multi-agent guidance, achieving complete swarm collection in approximately 150 seconds.
Shepherding UAV Swarms via Action Prediction Under Movement Constraints
Introduction and Motivation
The paper "Shepherding UAV Swarm with Action Prediction Based on Movement Constraints" (2604.17189) formulates a robust control methodology for UAV swarms inspired by bio-mimetic sheepdog herding. Unlike prior point-mass abstractions, this framework models both navigator and autonomous agents as constrained second-order integrators, explicitly enforcing real-world limits on velocity and acceleration. The method addresses the practical challenges of scaling shepherding protocols to real drone systems, mitigating issues arising from instantaneous control laws that neglect underlying hardware constraints. Central to the proposed system is a predictive, DWA-inspired controller in which the navigator agent samples feasible actions, predicts autonomous swarm responses via an internal behavioral model, and selects actions through an evaluation metric balancing goal-directed motion, safety, and group cohesion.
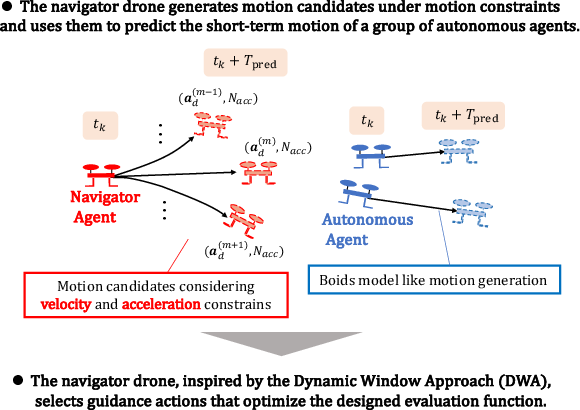
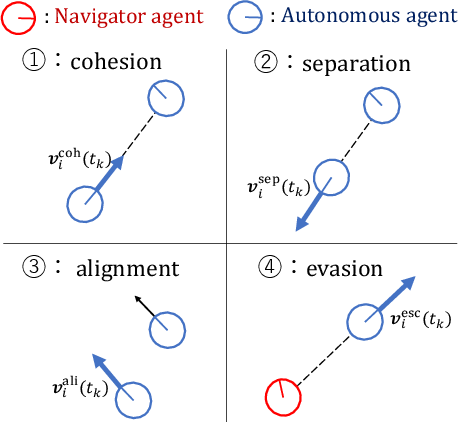
Figure 1: Conceptual diagram of the proposed approach, highlighting the navigator's candidate motion generation, internal prediction, and evaluation-selection pipeline.
Autonomous Agent Model: Constrained Boids Dynamics
The architecture adapts the classic Boids framework, incorporating cohesion, separation, alignment, and evasion terms, to yield collective motion suitable for shepherding and robust to actuation constraints.
The integration of these mechanisms produces a swarm that readily propagates navigator-induced movements while attenuating residual motion in quiescent states. Notably, the separation and evasion terms are regularized for actuation feasibility, enhancing the practical transferability to hardware platforms.
Guidance Algorithm: Predictive Control with Candidate Sampling
The core navigator control law constructs a DWA-like pipeline comprising:
- Cluster Analysis: Real-time DBSCAN partitioning of observed agents, facilitating adaptive switching between collecting disjoint clusters and direct goal guidance.
- Candidate Generation: Systematic discretization of admissible accelerations and segment durations within kinematic bounds.
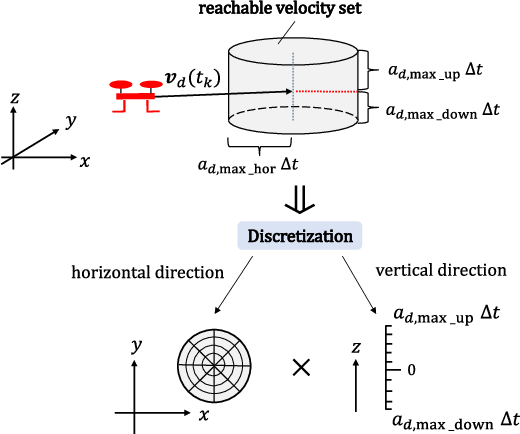
Figure 4: Conceptual diagram of acceleration candidate generation for the navigator agent.
- Short-Horizon Prediction: Simulation of swarm response for each candidate action utilizing the internal agent model.
- Cost Evaluation: Weighted multi-criteria assessment integrating:
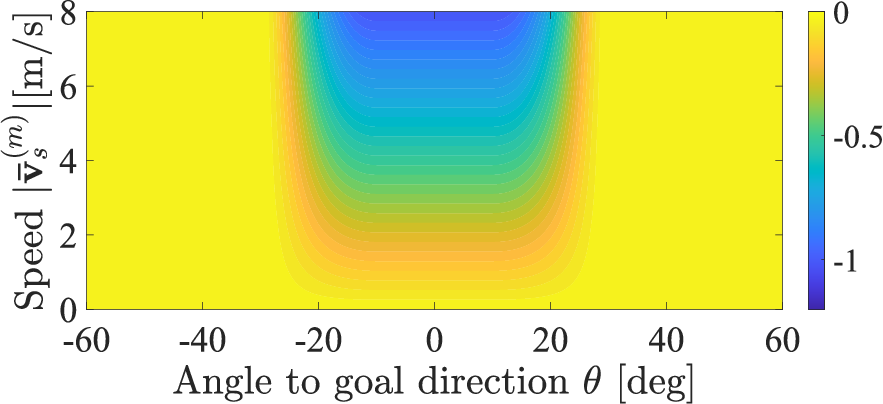
- Terminal velocity toward goal (rewarding progress, penalizing misalignment).
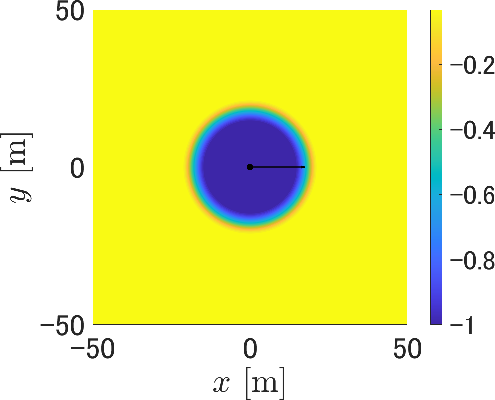
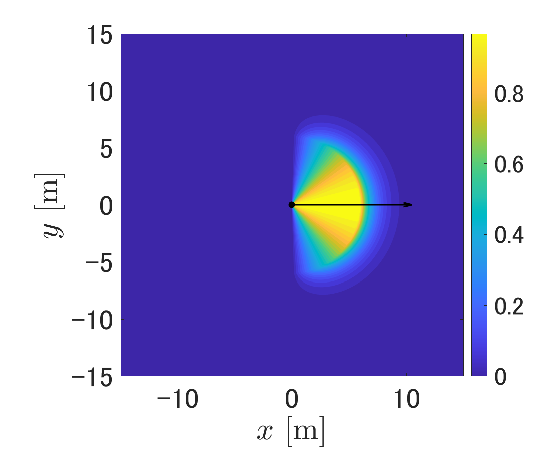
- Navigator-to-swarm positioning (distance- and angle-sensitive).
- Observation maintenance (risk of losing swarm awareness).
- Path-based split avoidance (discouraging transversal fragmentation).
- Safety (collision risk and altitude maintenance).
- Selection and Execution: Optimal candidate (minimum cost) is committed for the next control cycle.
The flexibility of this architecture admits tunable multi-objective behaviors and generalizes across swarm morphologies and deployment scenarios.
Evaluation Criteria and Cost Surfaces
The paper provides quantitative illustrations of critical cost landscapes:
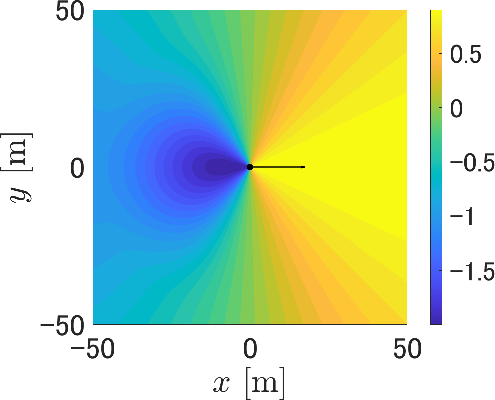
Figure 3: Heat map of position evaluation for far (top) and near (bottom) navigator initializations relative to the swarm.
This nuanced cost landscape enables the controller to balance aggression, safety, and group cohesion adaptively.
Simulation Results
Simulation experiments (MATLAB 2025b) demonstrate the system’s performance in scenarios with initially dispersed agents. The single navigator controller autonomously clusters, collects, and conveys all agents to a desired goal. Trajectories, distance-to-goal dynamics, and qualitative snapshots illustrate the system’s effectiveness in managing multi-cluster collection and tight navigation control under actuation constraints.
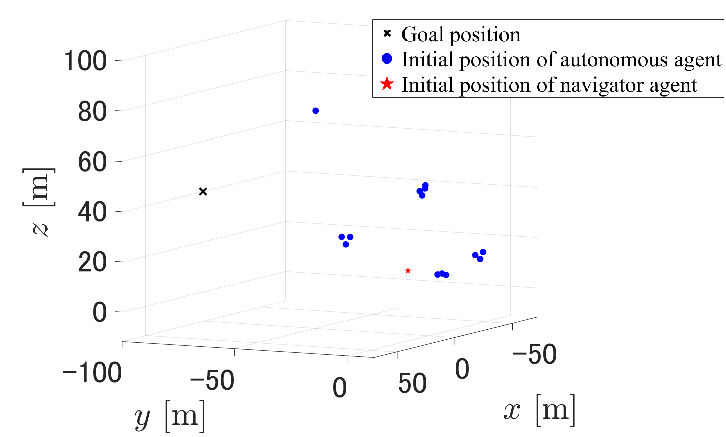
Figure 7: Initial positions of each agent (autonomous, navigator, and goal).
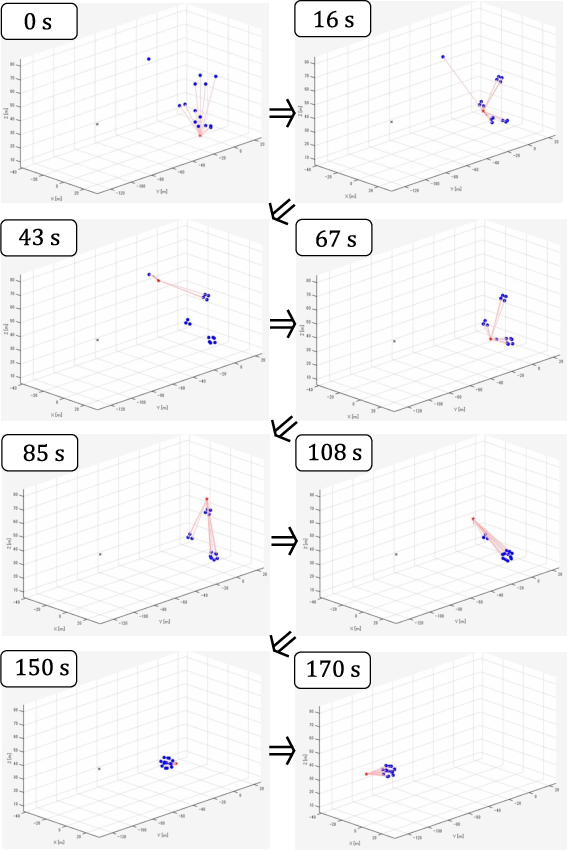
Figure 8: Snapshots of the guidance process showing collection and goal-directed navigation.
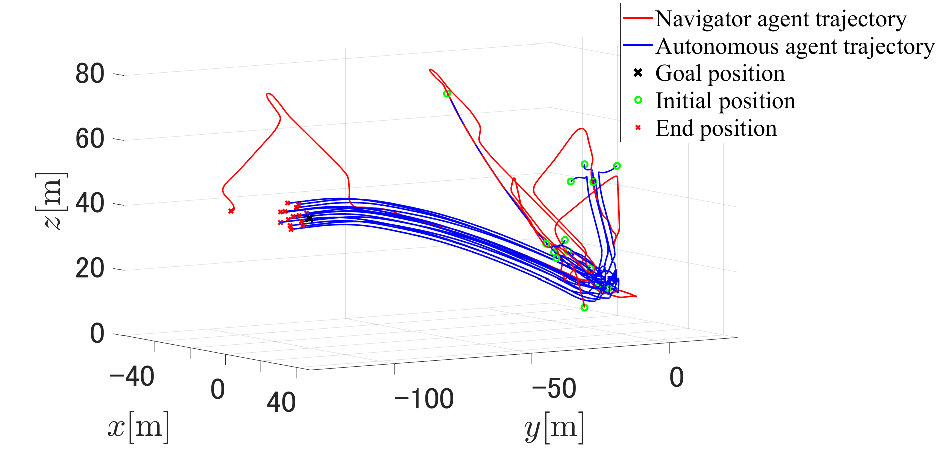
Figure 9: Simulation result with sparse initial positions highlighting the regrouping and approach trajectory.
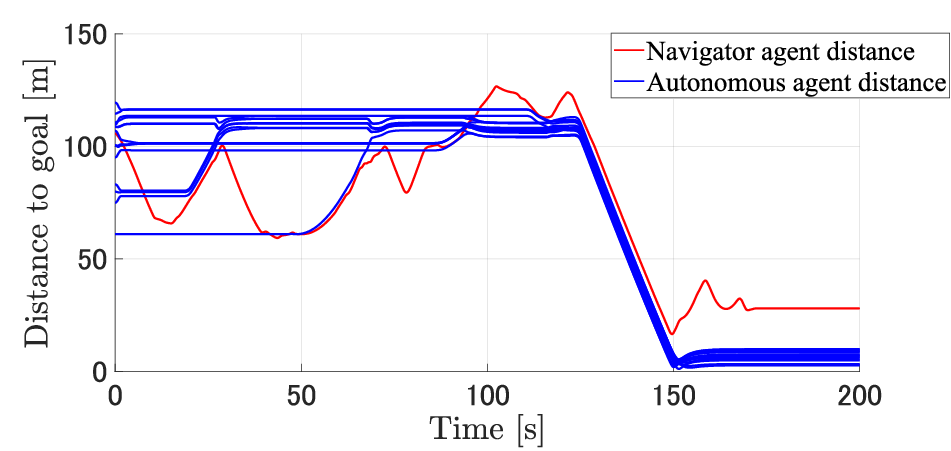
Figure 10: Distance to goal over time, showing rapid convergence under the proposed controller.
Numerical results confirm successful completion of the collection and guidance task in approximately 150 s for a 15-agent system with no agents left behind, even with significant initial spatial separation.
Theoretical and Practical Implications
The introduction of predictive action selection explicitly considering actuation constraints bridges the gap between idealized flocking models and deployable UAV platforms. Unlike controllers reliant upon instantaneous or unconstrained dynamics, this system is resilient to hardware-imposed limits, supporting direct transferability to real-world drone swarms. The framework is extensible beyond simple point-mass abstractions, supporting integration with more sophisticated vehicle or perception models. Additionally, the clustering-based task switcher (collection vs. driving) reflects realistic group fragmentation scenarios, enhancing robustness.
The authors note that the cost function design, including the relative weighting of competing objectives, remains open for optimal tuning—suggesting a direction for automated or learning-based meta-optimization. The modular architecture can also potentially incorporate data-driven or multi-agent RL policy components while retaining interpretable, analytically tractable safety constraints.
Conclusion
This work presents a predictive, constraint-aware shepherding control architecture for UAV swarms leveraging bio-inspired behavioral models and DWA-inspired action selection. The inclusion of actuation limits, safety regularization, and predictive swarm response marks a substantial advance in the direction of deployable, robust multi-agent navigation in realistic environments. Future directions include automated cost function synthesis and empirical testing on real-world UAV platforms.