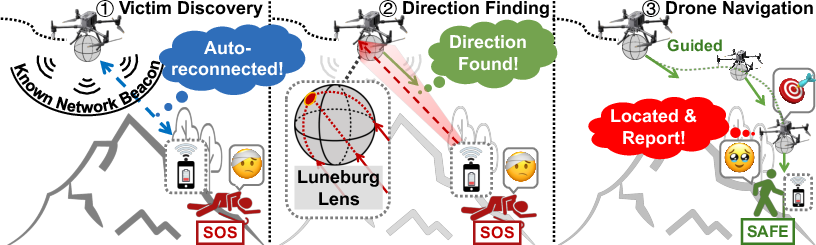
- The paper introduces an autonomous drone system that exploits Wi-Fi auto-reconnection for victim identification without relying on infrastructure.
- The paper employs a novel 3D-printed Luneburg Lens with RSS-only 3D AoA estimation to achieve accurate directional finding without in-flight recalibration.
- The paper demonstrates significant performance improvements with up to 104% extension in discovery range and rapid victim localization with a 5 m error margin in field trials.
Autonomous Wi-Fi Drone System for Wilderness Search and Rescue
Introduction and Motivation
The paper introduces an autonomous drone-based Wi-Fi system tailored for Wilderness Search and Rescue (WiSAR), targeting the limitations of current human-operated and vision-based methods under occluded or rugged terrain. The central observation is the ubiquity of Wi-Fi-enabled mobile devices carried by most individuals, including in wilderness situations. The system exploits the native auto-reconnection behavior of commodity devices to elicit identifiable traffic without user cooperation. This approach fundamentally augments the operational range and practical viability of drone-based search under severe environmental constraints.
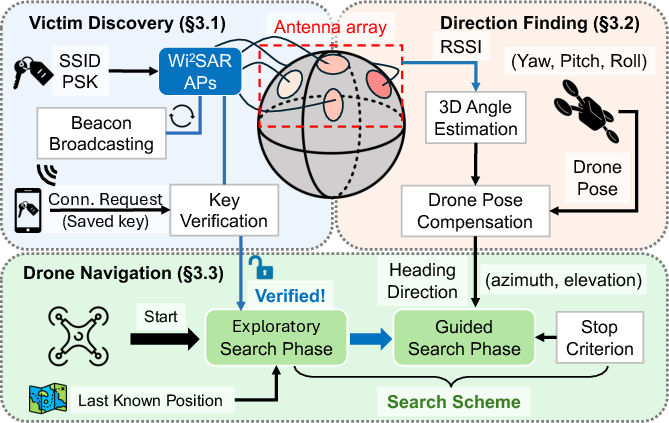
Figure 2: Modular overview of the Wi-Fi drone system showcasing its victim discovery, direction finding, and drone navigation pipeline.
System Architecture and Design Principles
The system addresses three pivotal challenges in wireless drone-aided WiSAR: long-range device discovery, accurate 3D direction finding, and robust, autonomous drone navigation. The architecture is modular, comprising:
Electromagnetic Luneburg Lens Front-end
A core innovation is the use of a 3D-printed Luneburg Lens as a passive front-end, which serves two functions: extending communication range and endowing the system with passive 3D angular selectivity. The lens utilizes a quasi-continuous graded refractive index, realized via FDM 3D printing with graded Gyroid infills, providing a deterministic power pattern for incident signals across the upper hemisphere.
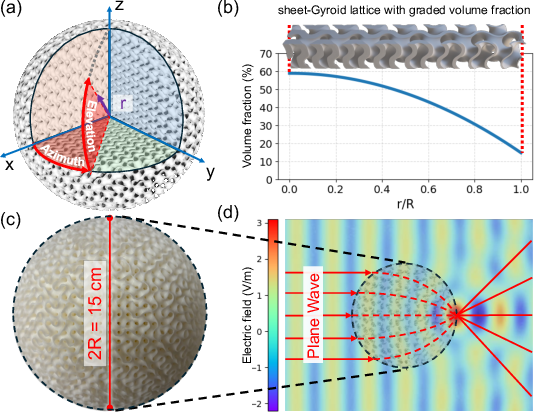
Figure 3: Internal architecture and fabrication of the 15 cm Luneburg Lens, including graded infill, 3D-printed prototype, and electric field simulation.
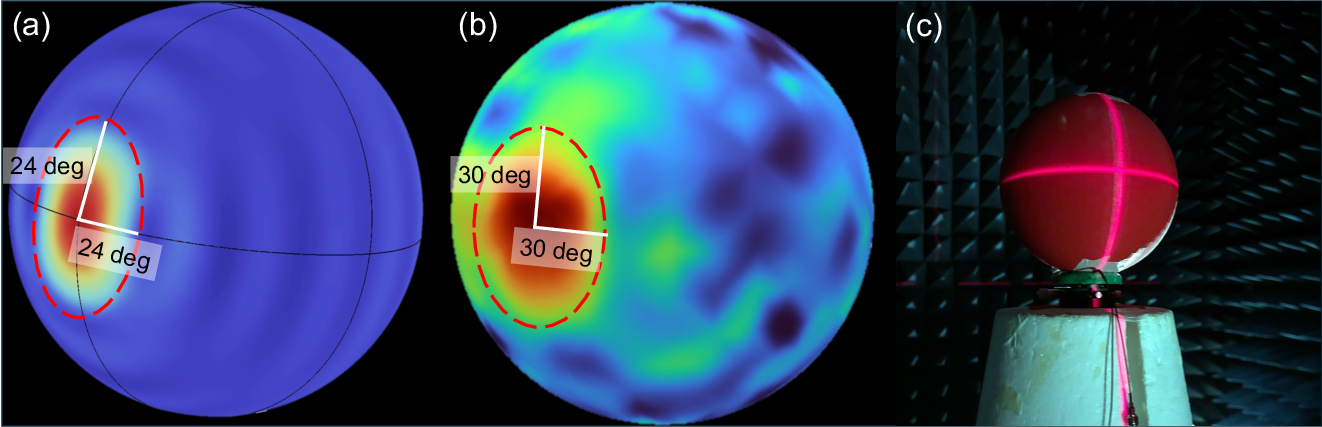
Figure 4: Empirical and simulated beam patterns of the Luneburg Lens, evidencing high directional gain and consistent electromagnetic focusing.
Directional estimation is achieved by matching observed de-meaned RSS vectors to the pre-characterized lens beam template via least squares correlation, inherently robust to unknown transmit power, range-dependent path loss, and uncalibrated device heterogeneity.
System Implementation
The system is implemented on a DJI Matrice 350 platform, equipped with a Raspberry Pi CM4 and five Intel AX200 NICs, interfaced via PCIe risers to ten surface-mount FPC antennas conforming to the lens. The dual-mode architecture supports simultaneous AP (for beaconing and association/authentication) and monitor (for omnipresent packet capture and RSS extraction), with custom aggregation to synchronize RSS vectors per packet across NICs.
This physical design ensures that both uplink and downlink communication exploits the lens’s main lobe, maintaining symmetric range extension and maximum angular information content.
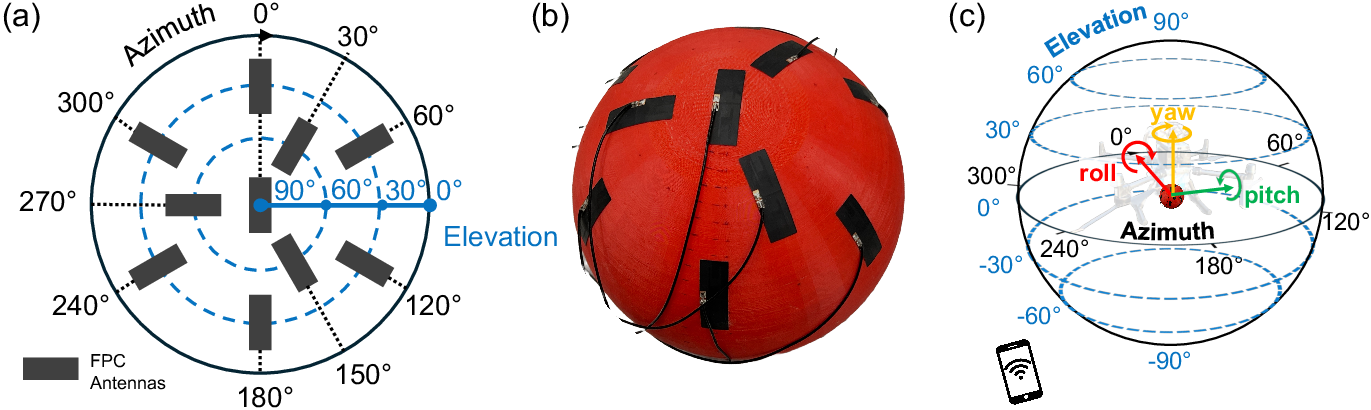
Figure 5: FPC antenna layout and deployment on the lens, aligned to drone body axes for direct coordinate system integration.
Experimental Evaluation
Comprehensive experiments were conducted in four outdoor environments (open, forested, rugged, shoreline), employing various target types (smartphones, tablet, smartwatch) and placements. Evaluation benchmarks include competitor systems such as CSI-based AoA (ArrayTrack) with continuous and one-shot calibration in real search conditions.
Victim Discovery Range: The Luneburg Lens extends aerial device discovery by up to 104% at 5 GHz and 80% at 2.4 GHz (LoS), with similar gains under NLoS foliage and terrain, establishing a new regime for practical drone-aided wireless search.
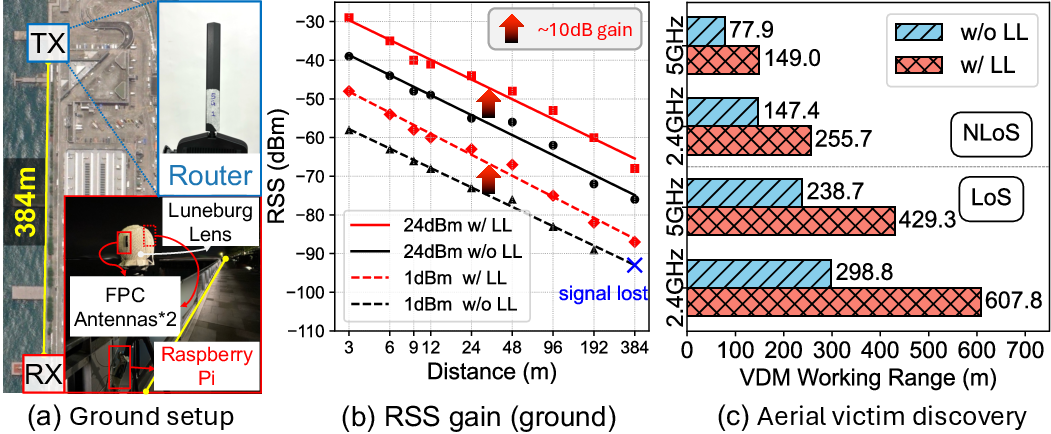
Figure 8: Quantified RSS gains and effective victim discovery range achieved by integrating the Luneburg Lens in ground and aerial configurations.
Direction Finding Accuracy: The system achieves median AoA errors of 18.4∘ across thousands of in vivo packet samples, exhibiting stable performance across azimuth/elevation, drone speeds (hover to 5.5 m/s), target diversity, and substantial SNR variations. Unlike traditional CSI-based methods, whose accuracy degrades >10× in the absence of continuous calibration (as on a moving drone), the proposed RSS-Lens scheme maintains a median error of 6.0∘ over the full 360∘ FoV and does not require in-flight recalibration.
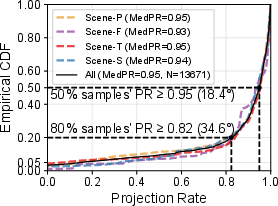
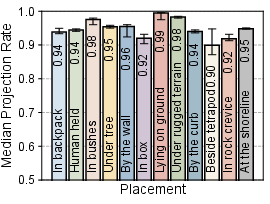
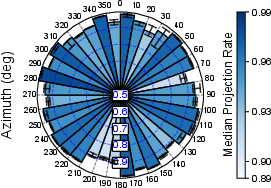
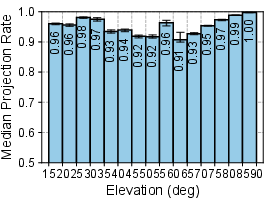
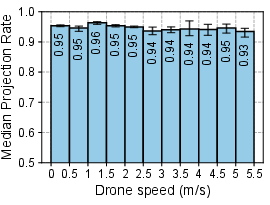
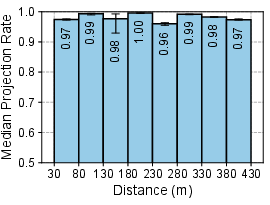
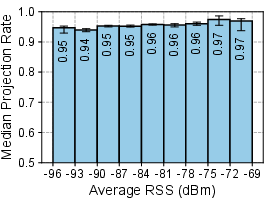
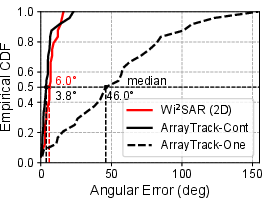
Figure 10: Direction Finding accuracy across scenes, placements, incident angles, speeds, and SNR; comparison with calibrated/un-calibrated CSI phased arrays.
Search and Navigation: In a 400x400 m grid trial involving five randomly placed targets, the system achieves 100% discovery rate within 13.5 minutes. In single-blind fielded WiSAR cases (e.g., forested 40,000 m2), discovery occurs in under 4 minutes, with localization error of 5 m—well within the range for confirmatory rescue operations.

Figure 12: Drone search trajectories demonstrating efficient grid search, transition to guided navigation, and fine-grained final localization under dense foliage.
Implications and Extensions
The system demonstrates several critical advancements:
- Infrastructure Independence: No reliance on public/cellular infrastructure or victim-side application modifications.
- Robustness: Insensitivity to commodity device heterogeneity, victim motion, device placement, vegetation-induced attenuation, and dynamic attitude of the drone.
- Practical Integration: Efficient energy and computational footprint, suitable for onboard edge processing and with negligible impact on drone operational range.
- Extendibility: The RSS-Lens pipeline is protocol-agnostic and could be extended to other wireless signals (e.g., LTE/5G, LoRa, BLE) via adaptation of the spoof-and-listen victim discovery step and appropriately rescaled lens geometry.
Potential augmentations include multi-drone coordination for very large areas, integration with standardized emergency SSIDs/protocols, and broader adaptation to non-Wi-Fi rescue beacons. Yet, the requirement for device power and prior knowledge of victim SSID/PSK is a limiting factor; future protocol designs, hardware adaptations, or area-specific pre-registration could further lower this barrier.
Conclusion
This work presents an integrated, infrastructure-free wireless search and localization system for WiSAR, overcoming the core technical constraints of range, directionality, and non-cooperative device identification in the field. The design’s efficacy is empirically validated under realistic, large-scale, and foliage-occluded conditions, demonstrating strong practical promise for accelerated rescue operations. The open-sourced stack and modular hardware/software abstractions pave the path for rapid adoption and cross-modality extension in both academic and operational SAR deployments.
Reference:
"Take Me Home, Wi-Fi Drone: A Drone-based Wireless System for Wilderness Search and Rescue" (2604.09115)