- The paper introduces a unified, physics-informed graph learning framework that converts heterogeneous 3D engineering data into graph-structured formats for CAE and CFD applications.
- It leverages explainable GNNs with region-aware pooling and uncertainty quantification to achieve near-perfect accuracy in multi-vehicle CAE mode classification.
- The approach demonstrates transferability and efficiency with a physics-informed GNN yielding R² > 0.98 for aerodynamic field prediction and rapid GPU inference.
Generalizable Graph Learning Frameworks for 3D Engineering AI
Introduction and Motivation
Contemporary automotive engineering workflows generate and process heterogeneous 3D data encompassing finite element (FE) models, body-in-white (BiW) representations, CAD geometry, and CFD meshes. Integration, reuse, and interpretability across these disparate assets are hindered by data fragmentation and workflow-specific representations. The presented work formulates a unified, physics-aware graph learning framework whereby diverse 3D engineering artifacts are mapped to graph-structured data, enabling downstream task support for CAE vibration mode classification and CFD aerodynamic field prediction. The framework leverages graph neural networks (GNNs) to embed engineering priors via node and edge definition, relation attributes, and region-aware aggregation, facilitating cross-variant model reuse and interpretability.
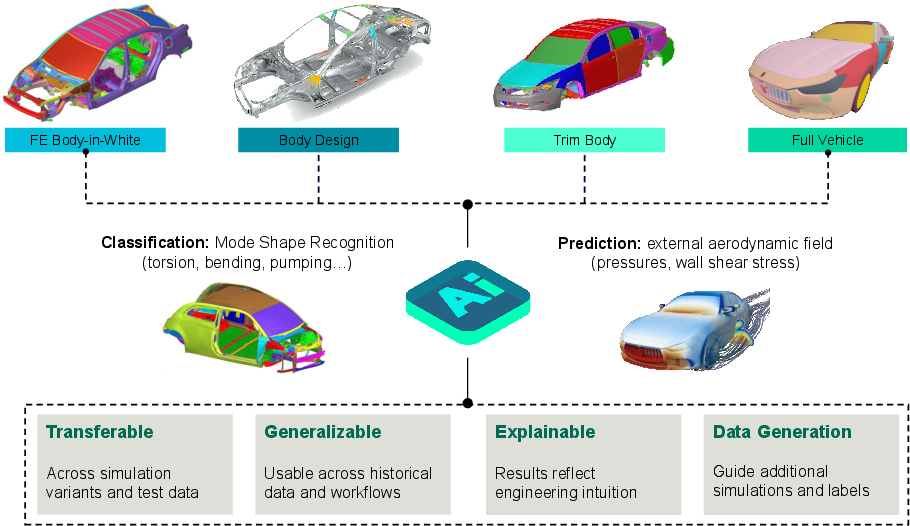
Figure 1: Overview of the proposed graph learning framework integrating heterogeneous 3D models for CAE and CFD workflows.
The methodology is validated in two industrially relevant domains: (1) CAE mode shape classification from BiW graph abstraction for NVH analysis and (2) CFD surrogate modeling for node-wise aerodynamic field prediction. Explainability, uncertainty quantification, and workflow-centric data generation guidance are prioritized throughout, underlining the importance of transparency and trustworthiness in engineering AI.
Previous approaches for 3D mode shape recognition predominantly adopt rule-based systems, classical supervised learning with manually engineered features, or black-box deep learning architectures. These methods lack robustness to cross-vehicle transfer, are often brittle when faced with label scarcity, and provide limited interpretability. GNN-based approaches have recently demonstrated stronger invariance and regional relational reasoning in structural CAE domains [tohmuang2025modegcn]; however, most extant workflows remain tightly node- or task-specific.
In CFD surrogate modeling, grid-based CNNs and reduced-order models have yielded expedient field prediction but exhibit deficits in geometric flexibility and local structure preservation. Graph-based surrogates, e.g., MeshGraphNets [sanchez2020learning], augment geometric fidelity and domain adaptation but rarely offer robust explainability or guidance for iterative data generation.
Physics-informed neural networks (PINNs) and attention-based explainability have achieved some success but are not yet mature in heterogeneous engineering AI integration. The present work advances the state of the art by explicitly fusing engineering semantics into graph construction, leveraging explainable region-aware pooling, and incorporating uncertainty-driven data generation within reusable pipelines.
Framework Design
A unifying engineering-centric graph abstraction is proposed. Each asset is algorithmically transformed into a graph G=(V,E,X,R) with nodes V corresponding to canonical physical regions or surface mesh locations, edges E capturing domain-specific relations (structural adjacency, load-path coupling, etc.), and attributes X, R representing regional descriptors and relation features. This abstraction supports both classification and regression paradigms.
GNN encoders process these physics-aware graphs, employing multi-head attention and hierarchical pooling aligned with engineering decomposition, as seen in the BiW representation:
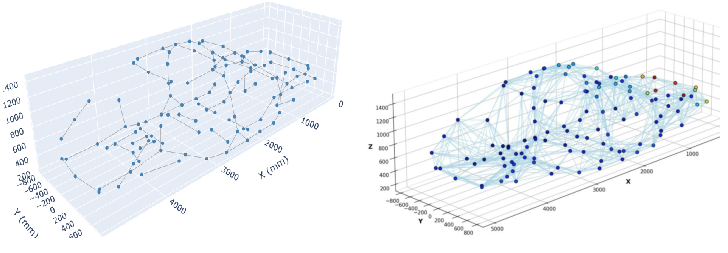
Figure 2: Graph construction from vehicle wireframes captures engineering region connectivity.
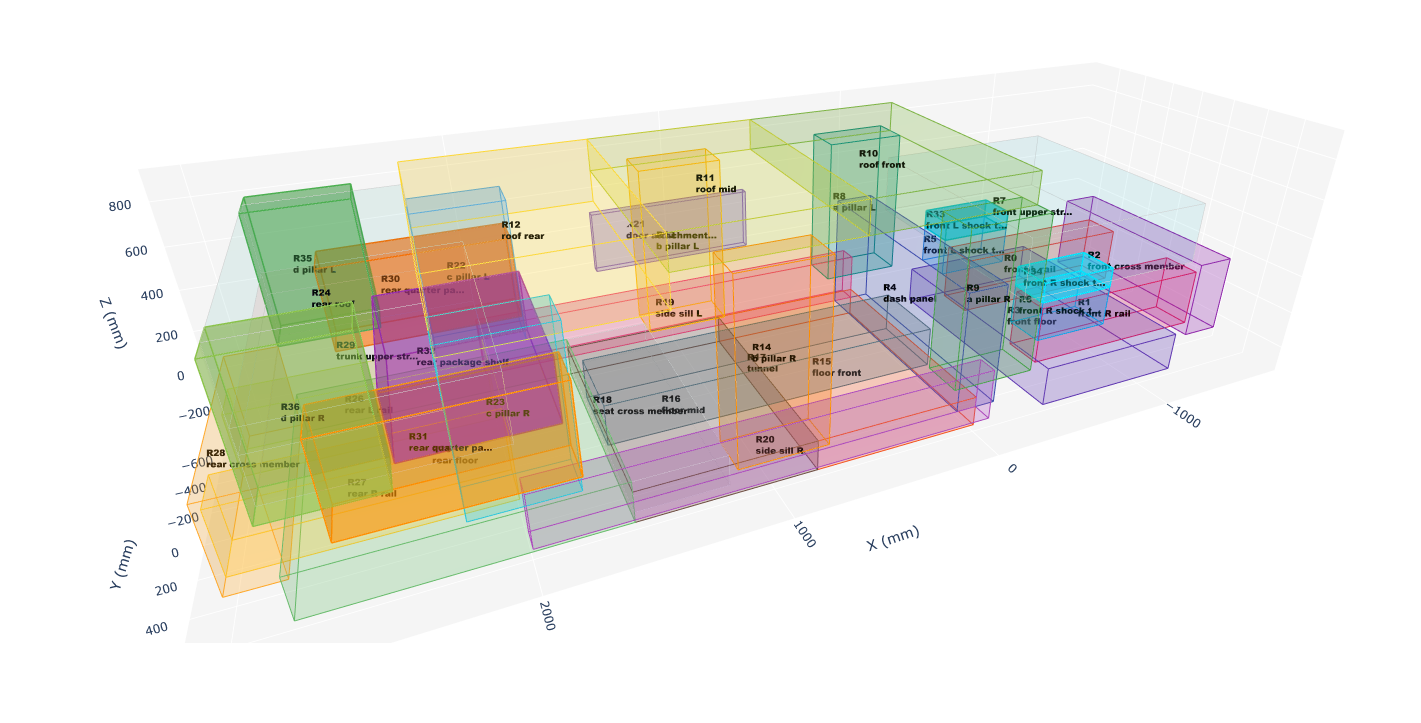
Figure 3: Canonical BiW decomposition for region-aware pooling/aggregation enables interpretability and transfer.
Interpretability is integral. Node and region attribution are mapped back to physically meaningful constructs, facilitating engineering review and diagnostic transparency. Uncertainty estimation augments this by identifying data regions and configurations with high epistemic risk, empowering active data generation and simulation prioritization.
Use Case A: CAE Mode Shape Classification
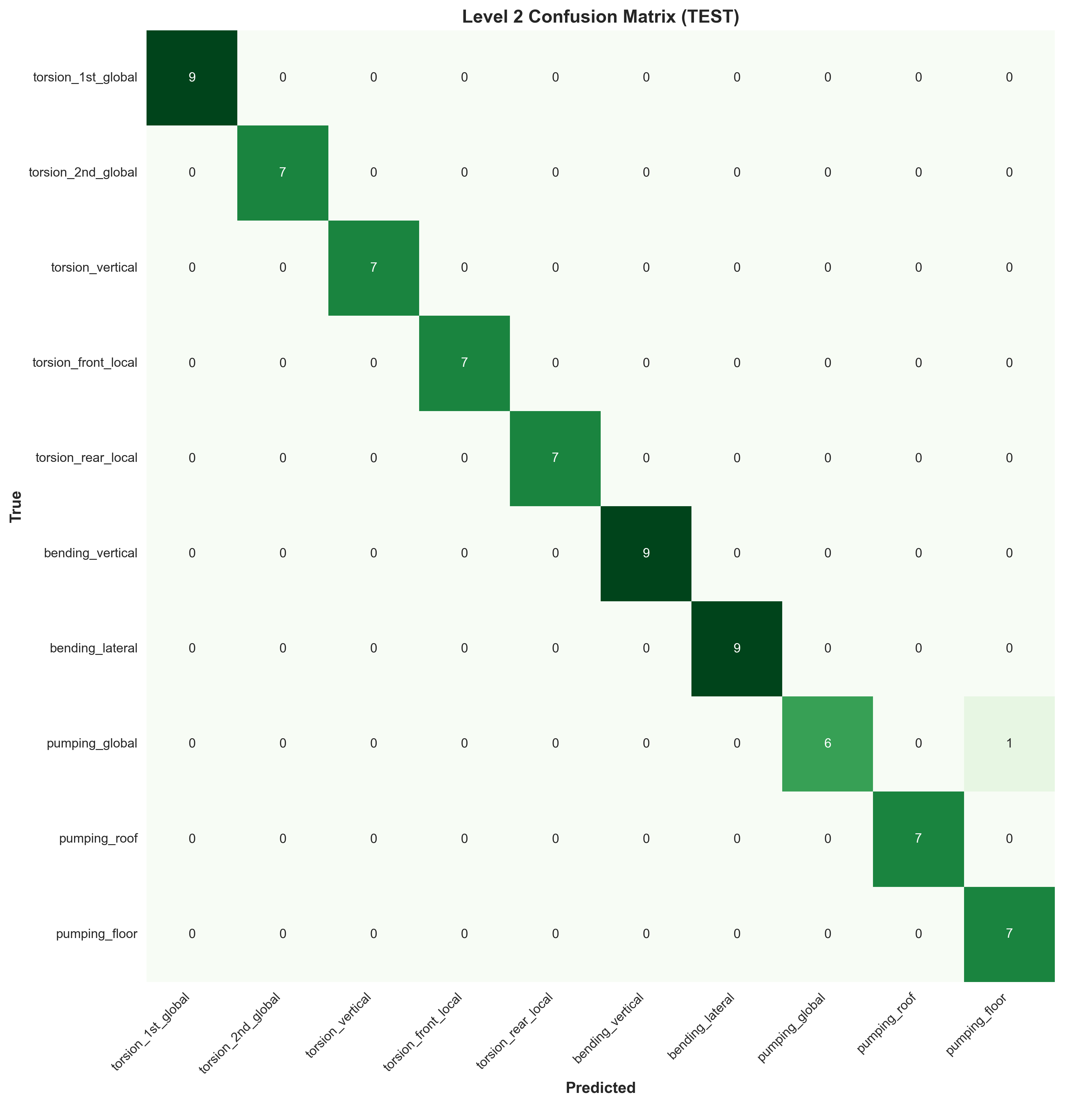
The task is hierarchical mode shape classification (e.g., torsion, bending, pumping), essential for NVH-informed product refinement. Raw FE model displacements are aggregated onto a canonical BiW graph topology, engineered to be invariant across vehicle variants and sensor layouts. Nodes represent consistent body regions, and edges encode domain-specific adjacencies and couplings.
Label efficiency is emphasized, simulating the industrial context where historical labels are sparse outside reference programs. Data augmentation, expert labeling, and MAC-based mode tracking facilitate label propagation to new variants with minimal manual effort.
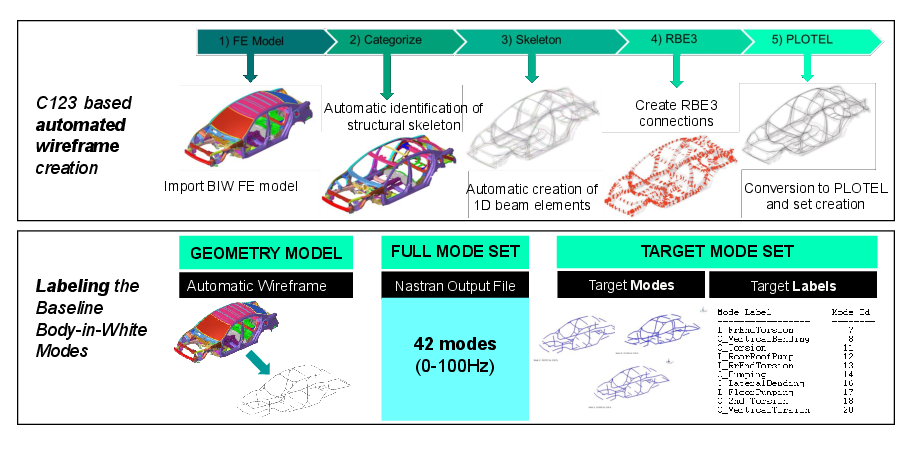
Figure 4: Data generation and hierarchical mode shape labelling pipeline for CAE workflows.
A multi-task GNN classifier with region-aware pooling achieves:
Explainability is realized via attention mapping:
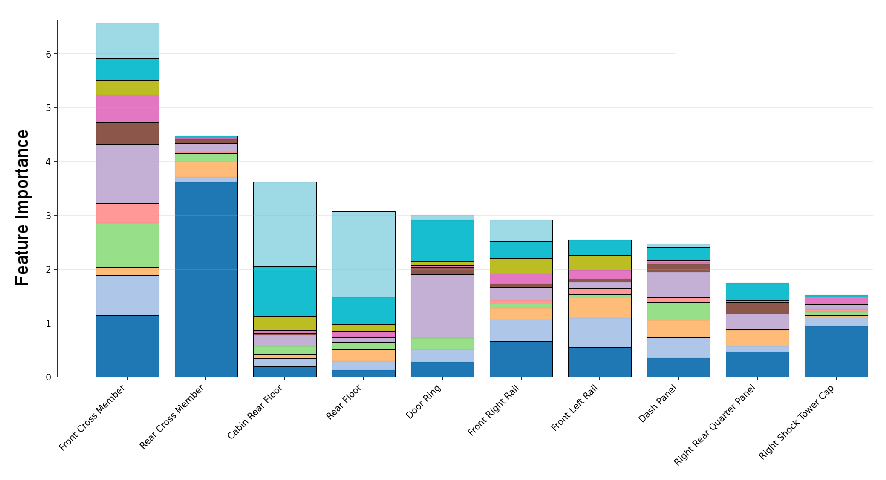
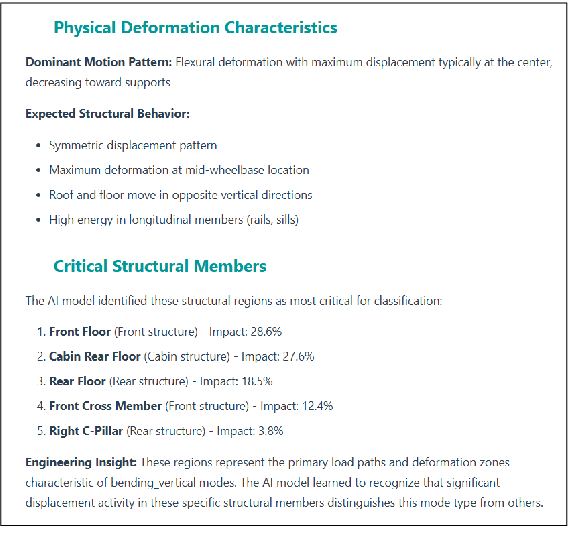
Figure 6: Attribution of classification decisions to specific BiW regions, aligning model reasoning with physical modes.
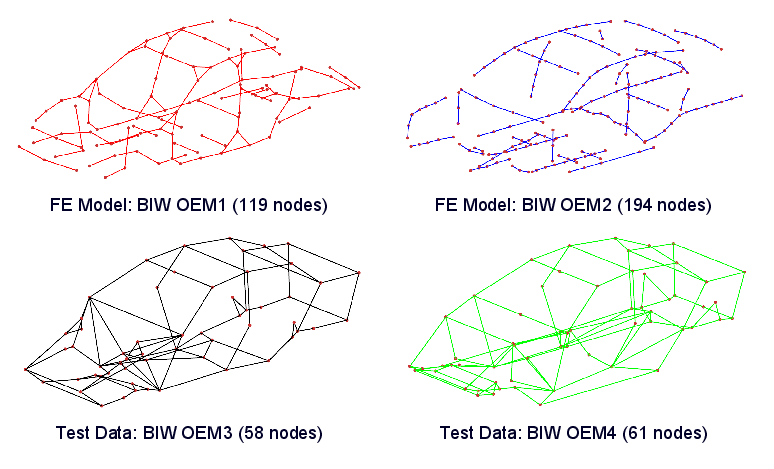
Figure 7: The four BiW architectures employed for cross-vehicle evaluation and transferability assessment.
The representation demonstrates high transferability: few-shot adaptation is feasible, and mapping simulation/test data to the canonical graph enables cross-domain reuse. This form of region-centric engineering abstraction is pivotal for practical application in evolving product scenarios.
Use Case B: CFD Aerodynamic Field Prediction
Aerodynamic field prediction is cast as node-level regression on surface mesh graphs, with node attributes encoding geometry, area, and positional context. The workflow incorporates symmetry-preserving downsampling to 15k nodes from 375k+ mesh vertices, crucial for tractability and bilateral consistency.
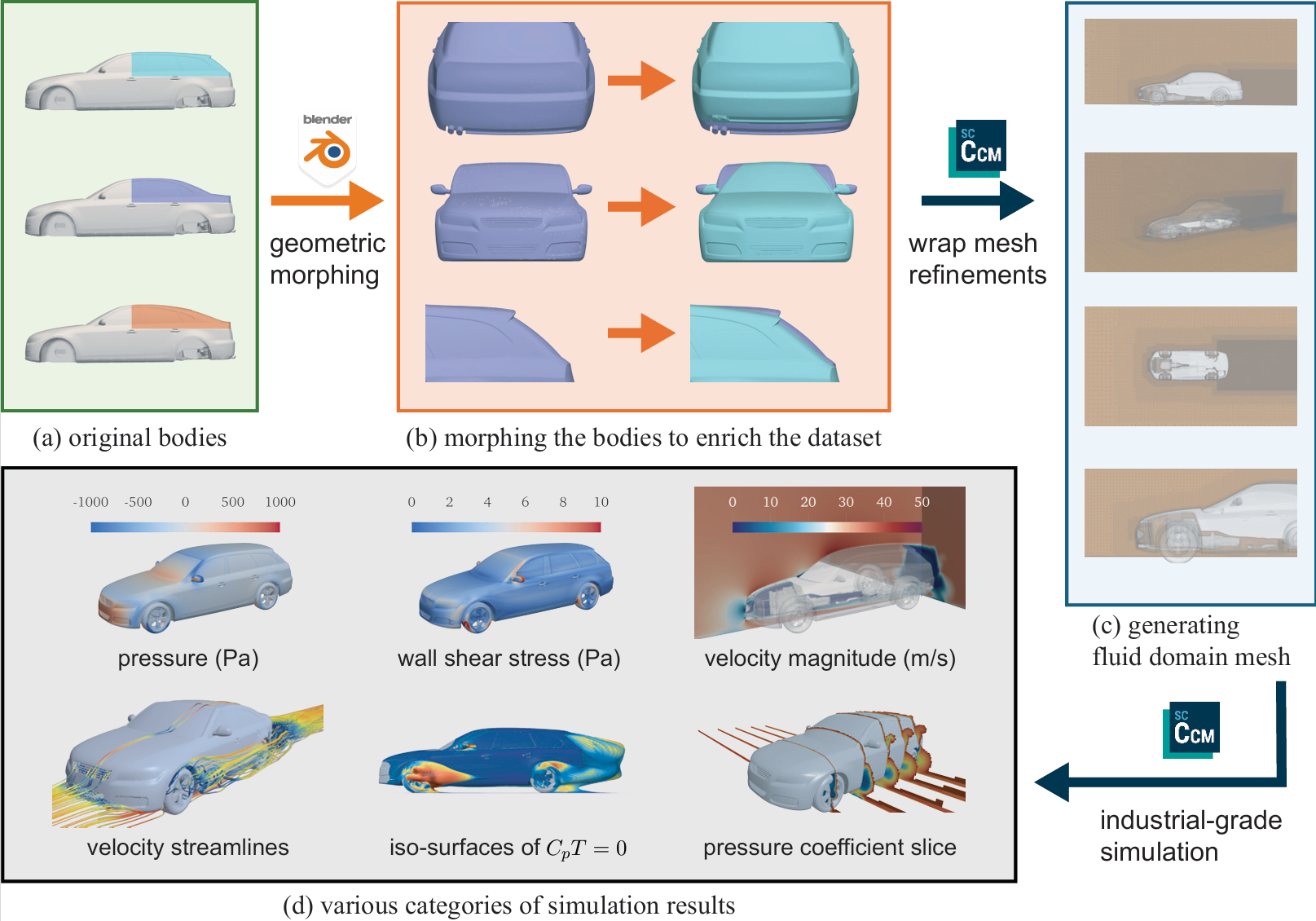
Figure 8: Preprocessing pipeline for DrivAerStar CFD datasets, integrating symmetry-aware downsampling.
A physics-informed GNN (AeroGraphNet) backbone is employed, with loss regularization enforcing Bernoulli consistency, mass conservation, and WSS tangency, in addition to standard data fidelity:
- R2=0.989 for surface pressure, R2=0.985 for WSS (wall shear stress)
- Pressure MAE: 21.58 Pa; WSS MAE: 0.49 Pa
- Symmetric downsampling essential: random or curvature-based sampling substantially degrades performance
- Inference latency: 57 ms/sample on GPU, suitable for iterative design exploitation
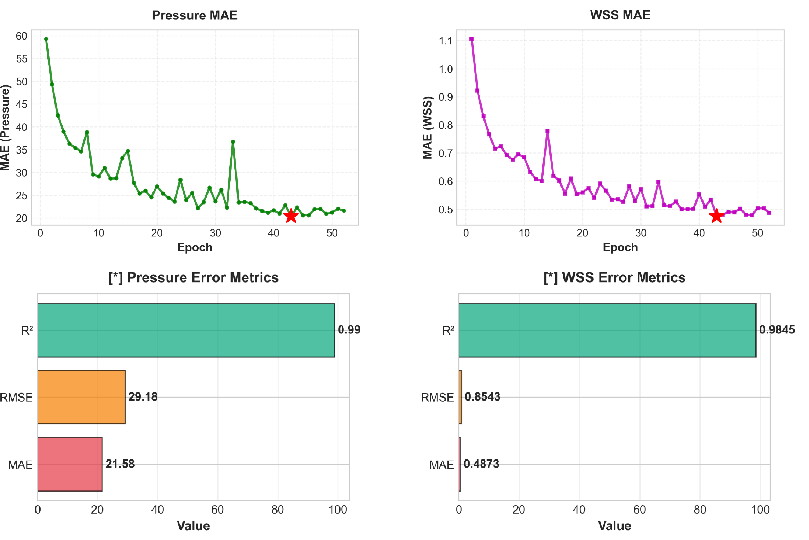
Figure 9: Training/validation accuracy traces for the physics-informed aerodynamic GNN.
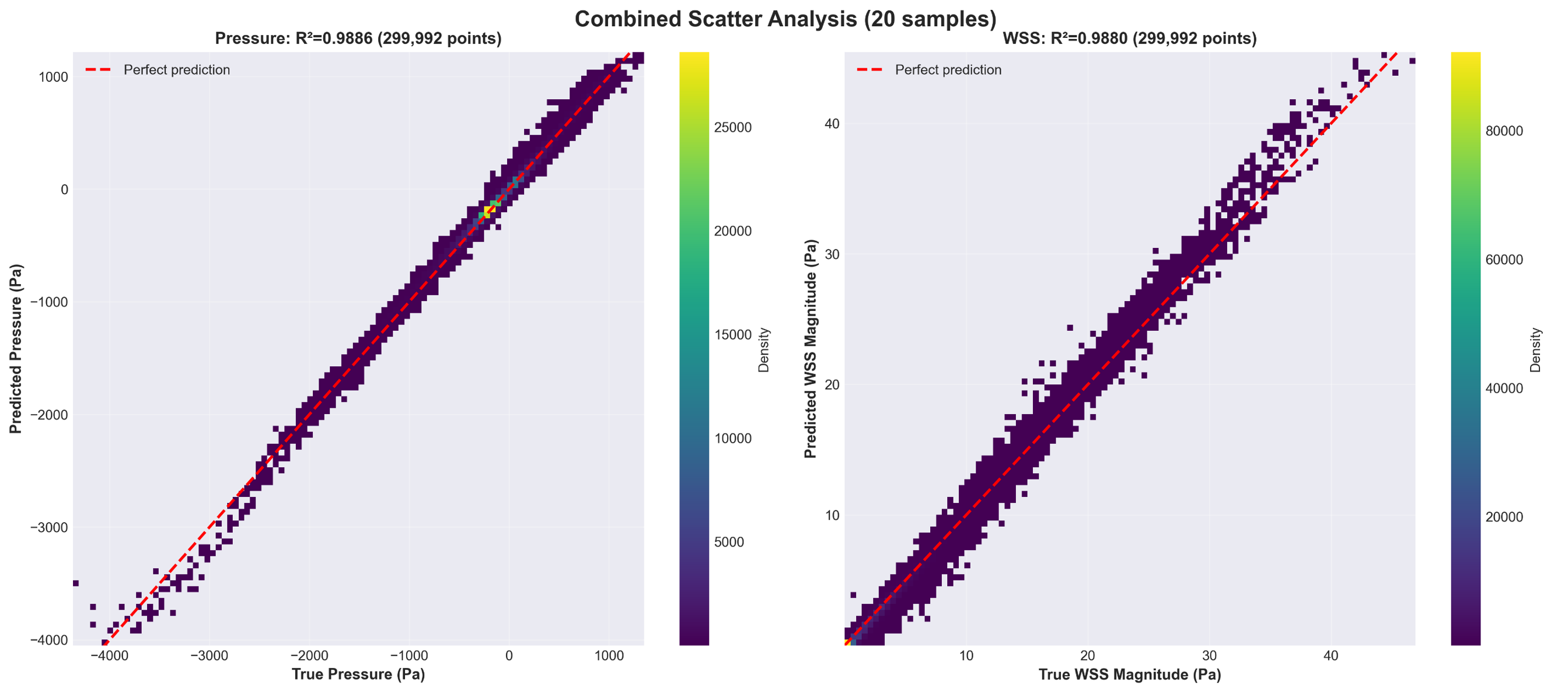
Figure 10: Quantitative comparison: physics-informed GNN achieves highest field prediction accuracy compared to relevant baselines.
Prediction results qualitatively and quantitatively match CFD reference data:
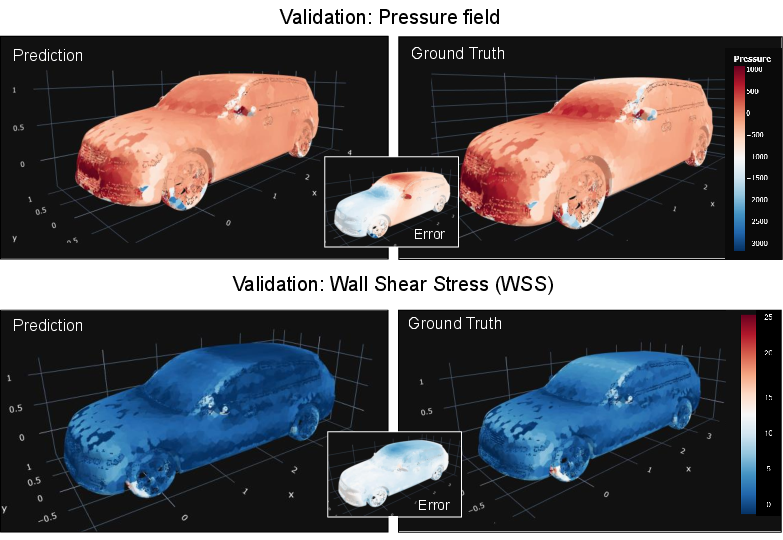
Figure 11: Visualization of predicted versus reference aerodynamic surface fields for representative samples.
Node- and region-level attention attribution elucidates predictive focus on physical flow structures:
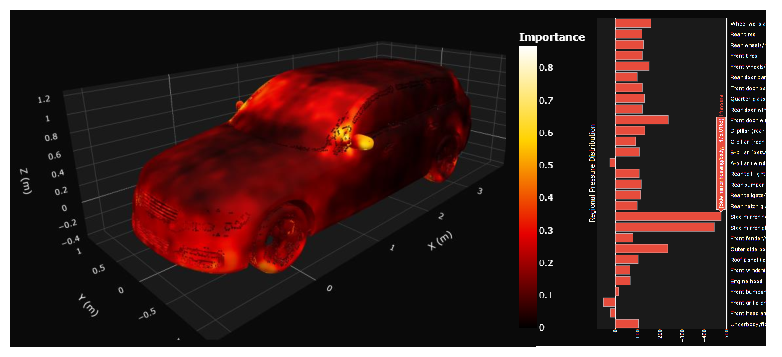
Figure 12: Explainability mapping—dominant regions for aerodynamic prediction identified, supporting engineering interpretability.
Uncertainty-aware analysis supports targeted data generation:
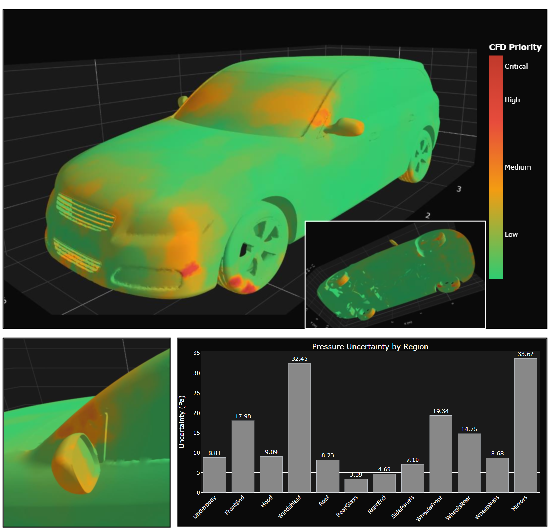
Figure 13: Uncertainty-guided data generation—framework prioritizes regions/geometries for additional CFD sampling.
Implications and Future Directions
This work demonstrates that physics-aware graph abstraction, combined with explainable GNN workflows, bridges the gap between task-specific AI and engineering-relevant, interpretable, and reusable pipelines. In both CAE and CFD domains, the approach yields strong out-of-domain generalization, supports label- and sample-efficient training, and offers direct routes for integrating domain expertise at both the data and model levels.
Contrary to universal foundation model narratives, this study positions representation-centric workflow design as the key enabler for engineering AI generalization, rather than architecture alone. Major implications include:
- Practical deployment: Enables label-limited, domain-adapted, and interpretable AI support within conventional engineering review cycles.
- Theoretical development: Suggests further exploration of region/semantic-aware graph construction and hybrid symbolic-neural interpretability.
- Extension: Uncertainty-guided active learning, broader geometry and BC coverage, and adaptation to multi-modal and cross-physics scenarios.
Conclusion
This paper establishes a reusable, physics- and engineering-informed graph learning framework for heterogeneous 3D engineering data, validated in both CAE and CFD scenarios relevant to automotive development (2604.07781). The combination of explainable workflow design, strong cross-variant transfer, and uncertainty-aware data generation produces a credible path toward trustworthy, interpretable, and extensible AI decision support for simulation-driven engineering. Future research will scale the approach across broader application contexts and integrate with advanced data generation and foundation modeling strategies.