- The paper introduces a unified design space that integrates persistent homology with deep neural networks to enhance 3D point cloud analysis.
- It formalizes six injection points for PH, enabling improved sampling, neighborhood construction, and topological feature extraction.
- Empirical results on ModelNet40 and ShapeNetPart demonstrate significant accuracy gains despite higher computational costs.
A Persistent Homology Design Space for 3D Point Cloud Deep Learning
Introduction: Motivation and Context
Effective representation and analysis of 3D point cloud data are fundamental problems in geometric deep learning, with applications in robotics, computer vision, and scientific computing. Traditional descriptors prioritize geometric features, resulting in models that are often sensitive to sampling irregularity and occlusion. The paper "A Persistent Homology Design Space for 3D Point Cloud Deep Learning" (2604.04299) addresses this challenge by systematizing the integration of persistent homology (PH)—a core tool from topological data analysis (TDA)—within deep learning pipelines for 3D point clouds. The authors construct a unified design space for PH-driven 3D learning (3DPHDL), formalizing how topological reasoning can serve as a robust, multi-scale inductive bias at multiple architectural levels.
Persistent Homology: Mathematical Foundations
The core of PH is the encoding of topological invariants—connected components, tunnels, voids—robust under small perturbations and deformations, and succinctly captured by Betti numbers.

Figure 1: Illustrative 3D objects with different topologies, each annotated by Betti numbers quantifying $0$D, $1$D, and $2$D holes.
Point clouds X⊂R3 lack explicit topological structure. PH imposes topology using constructions such as Vietoris-Rips, α-, Delaunay, cubical, witness, and flood complexes, each with distinct computational and representational trade-offs.
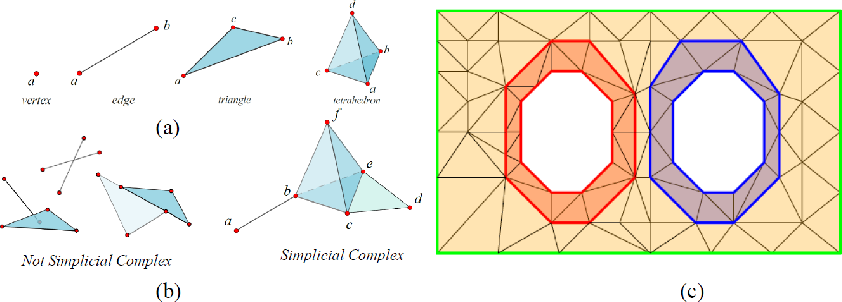
Figure 2: Example simplices (0–3D), valid and invalid complexes, and illustration of homological cycles within a simplicial complex.
A filtration—a nested sequence of complexes indexed by a parameter, typically scale—enables the computation of topological features at multiple resolutions. PH tracks the birth and death of each topological feature as the parameter increases, encoding this information in persistence diagrams or barcodes.
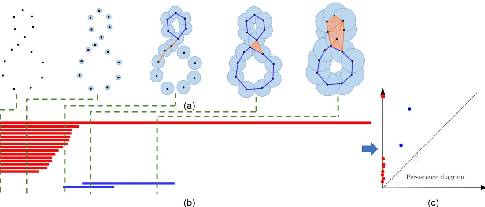
Figure 3: Computation of PH: scale growth (left), barcode representation of feature lifetimes (center), and the persistence diagram (right).
The 3DPHDL Design Space: Axes and Injection Points
The paper formalizes the PH-augmented 3D learning workflow as a system of axes governing complex construction, filtration type, persistence calculation, vectorization, neural architecture, and prediction target.
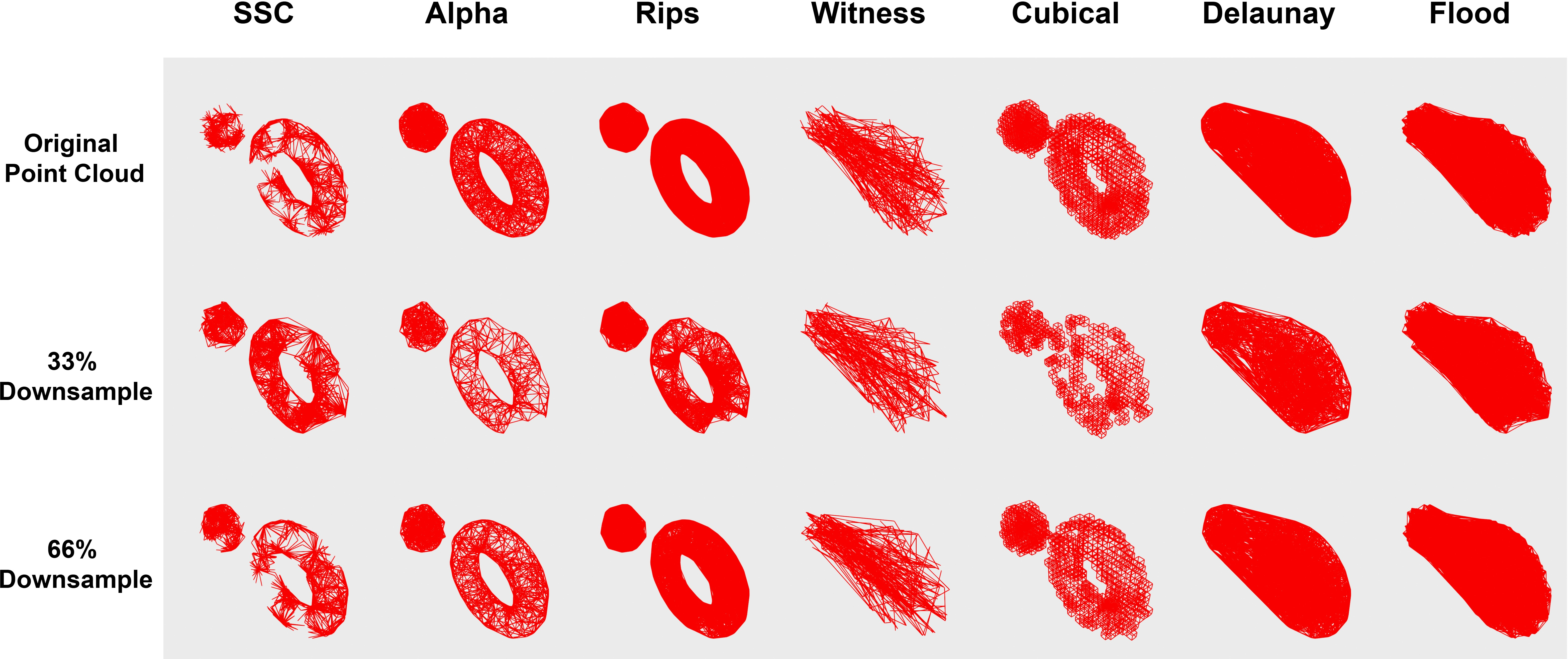
Figure 4: Representative complex constructions (Delaunay, α, VR, witness, cubical, etc.) for point clouds—the basis for PH.
The authors extend the canonical pipeline by enumerating six principled PH "injection points," allowing topological information to permeate data sampling, neighborhood graphs, optimization, self-supervision, output calibration, and model regularization.
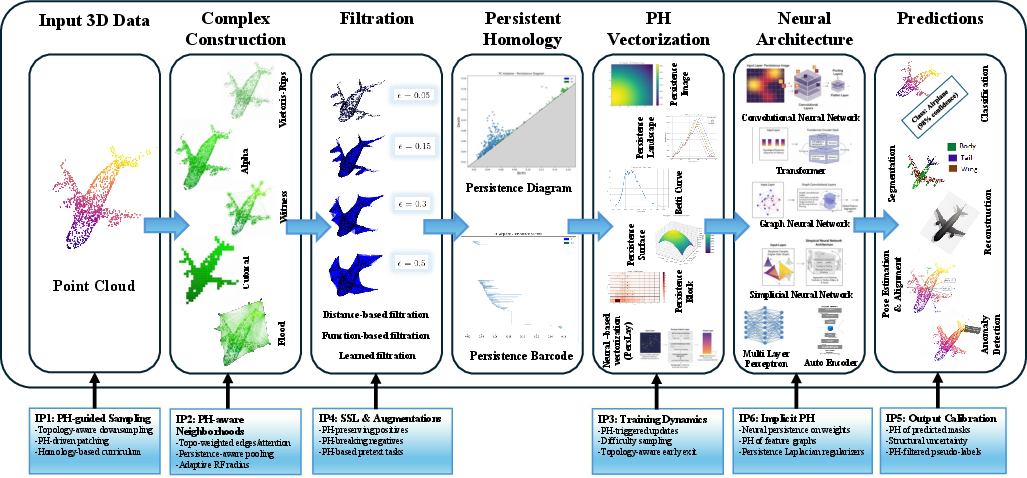
Figure 5: Design-space diagram showing the canonical PHML pipeline and six injection points (IP1–IP6) where PH can inform various architectural and learning stages.
The most salient axes are:
- Complex Construction: Choice among VR, α, cubical, Delaunay, witness, and flood; each differs in scaling with data size, fidelity to underlying topology, and computational cost.
- Filtration Strategy: Standard scale-based, density/height-based, or learned differentiable filtration functions.
- PH Representation: Persistence diagrams (PD), landscapes (PL), images (PI), Betti curves, PersLay, and higher parameter vectorizations.
- Integration and Fusion: Early or late fusion with backbone models (PointNet, DGCNN, Point Transformer, etc.) and direct incorporation into convolution or attention mechanisms.
- PH Injection Points: Sampling control (e.g., topology-aware downsampling/patching), neighborhood construction, curriculum design, augmentation and SSL, label space calibration, and architectural regularization (e.g., via persistent Laplacian penalties or neural persistence).
Theoretical and Computational Analysis
The theoretical backbone of this approach is provided by the stability theorems for PH. The bottleneck and Wasserstein distances on diagrams are shown to be Lipschitz stable with respect to perturbations in the filtration function, guaranteeing robustness to noise and sampling variations. The authors also highlight the stability and representational fidelity of vectorized summaries such as PIs and PLs.
Computational analysis reveals significant differences between complex constructions regarding efficiency and scalability.
Figure 6: Simplicial and cubical complexes constructed on sphere and torus point clouds at varying sampling densities.
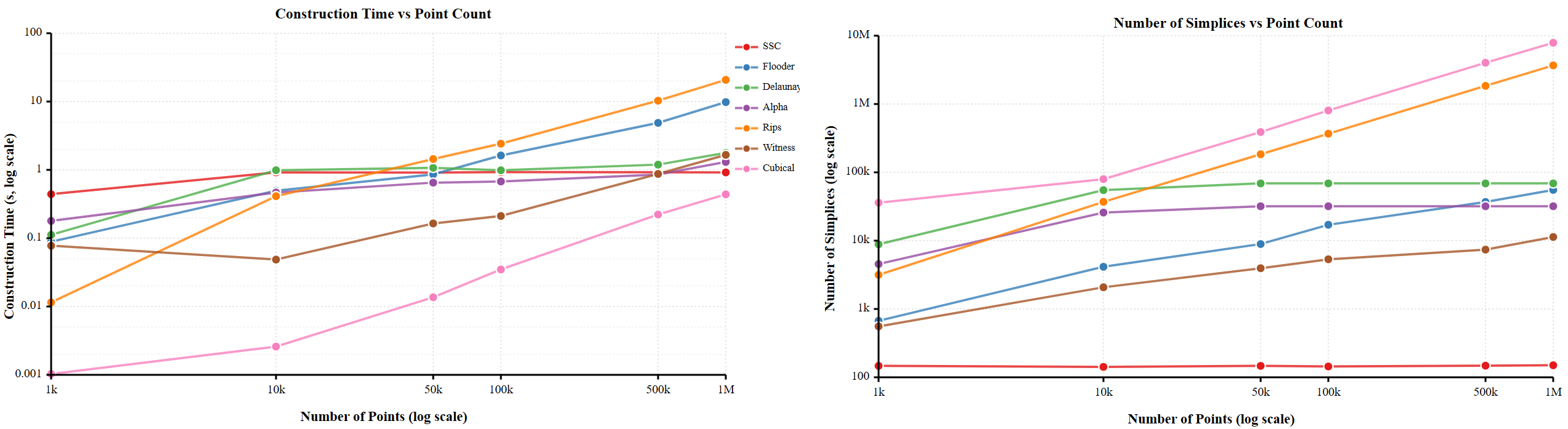
Figure 7: Scaling of construction time and number of simplices over point cloud sizes (1k–1M); cubical and SSC are efficient, Rips scales poorly.
Cubical and SSC exhibit favorable scaling, while Rips and alpha complexes become prohibitive at large n. Empirically, topological stability under noise and subsampling is quantified using Wasserstein distance on persistence diagrams. Witness, cubical, and flood complexes yield stable diagrams across a range of perturbations.
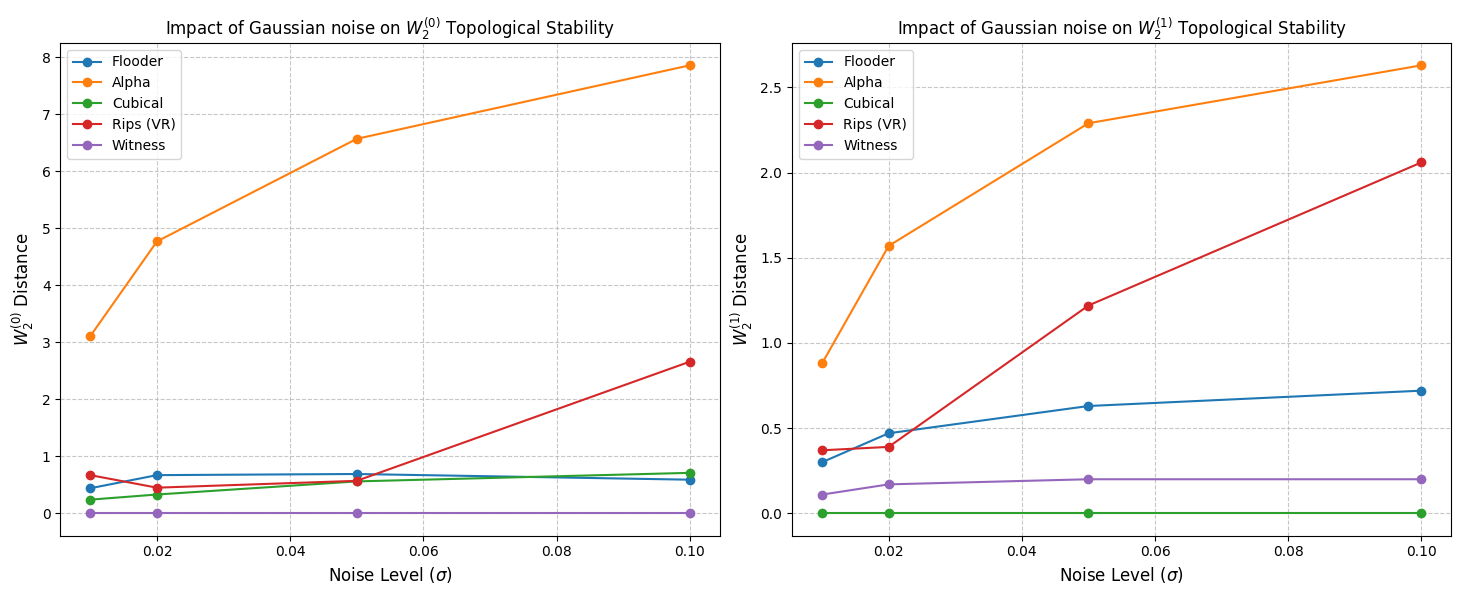
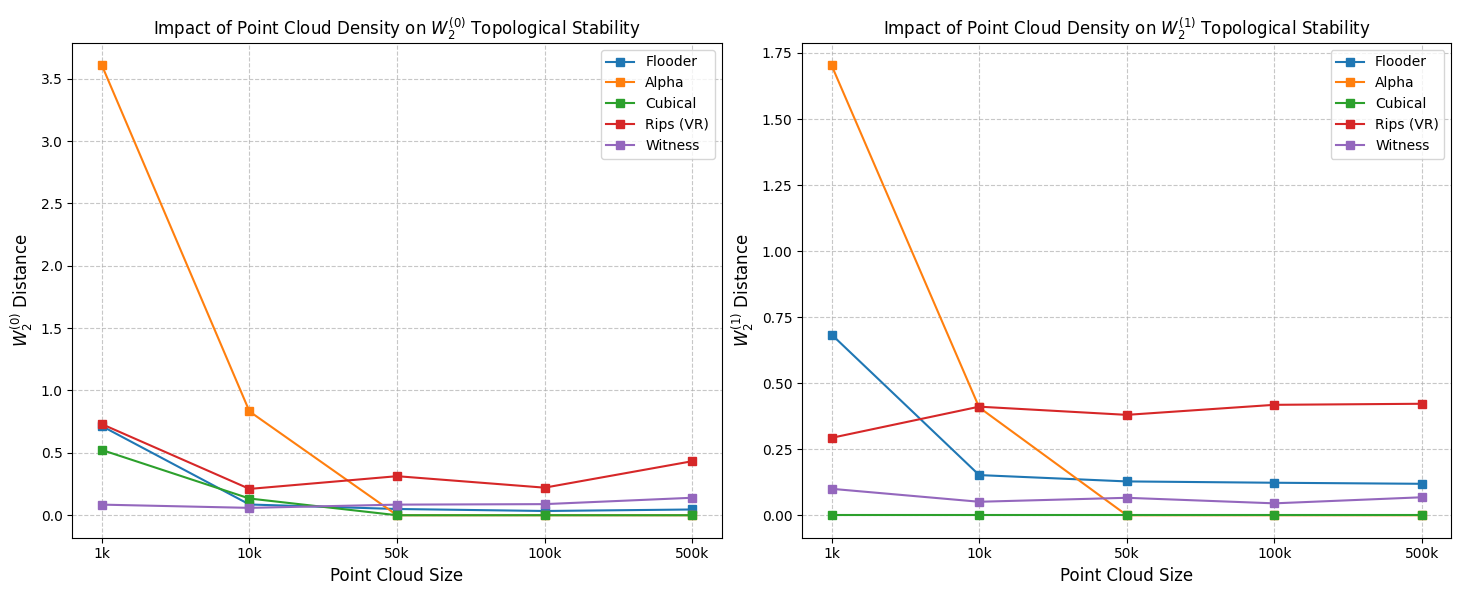
Figure 8: Stability (Wasserstein distance) of topological features under increasing Gaussian noise.
Empirical Evaluation
The framework is validated on ModelNet40 classification and ShapeNetPart segmentation tasks using PointNet, DGCNN, and PointTransformer backbones, each modified to integrate PH-derived features through multiple vectorization routes (PD, PI, PL).
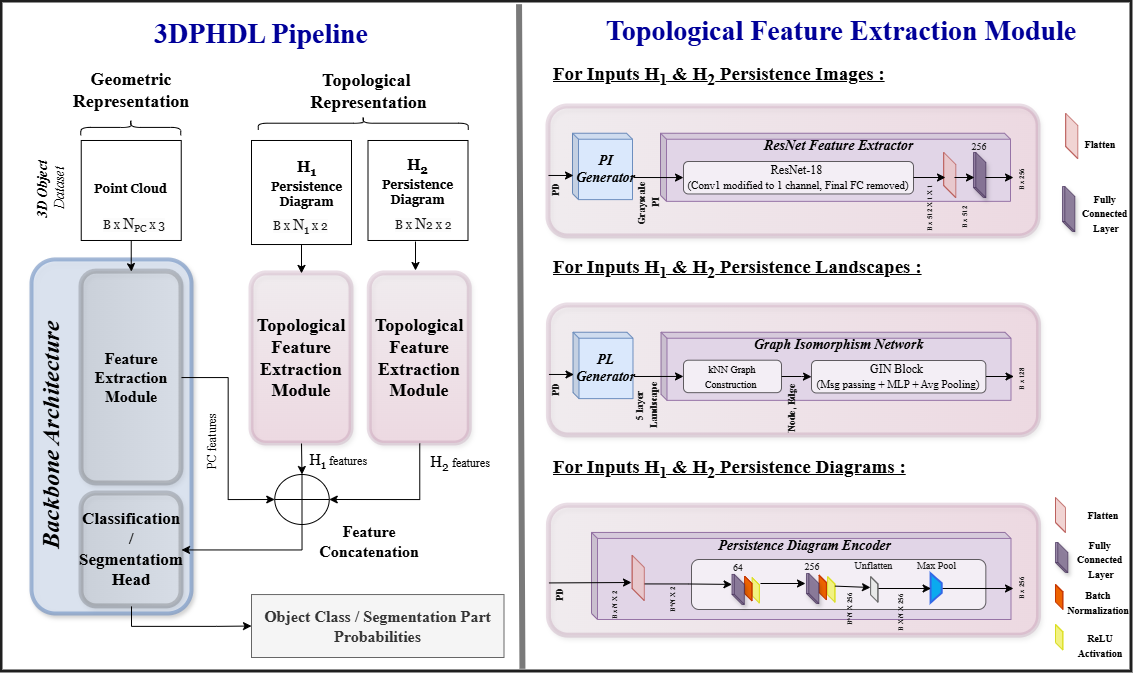
Figure 9: Modified backbone architectures for combining PH vectorizations with point cloud features in classification and segmentation tasks.
Ablation studies show that integrating vectorized PH consistently leads to higher accuracy, mIoU, F1, and robustness metrics compared to non-topological baselines. Notably, persistence landscapes (PL) and images (PI) offer the most significant improvements, especially for the more expressive DGCNN and PointTransformer backbones.
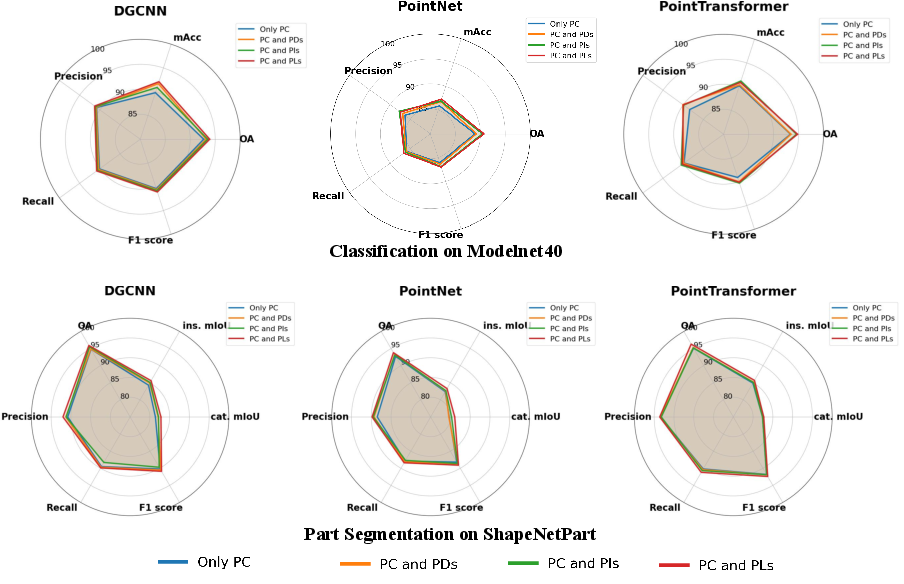
Figure 10: Classification and segmentation performance for each backbone and PH vectorization; PH consistently enhances all key metrics.
Qualitative assessment on part segmentation reveals improved delineation of semantically challenging regions, e.g., object handles or thin structures, with PH integration.
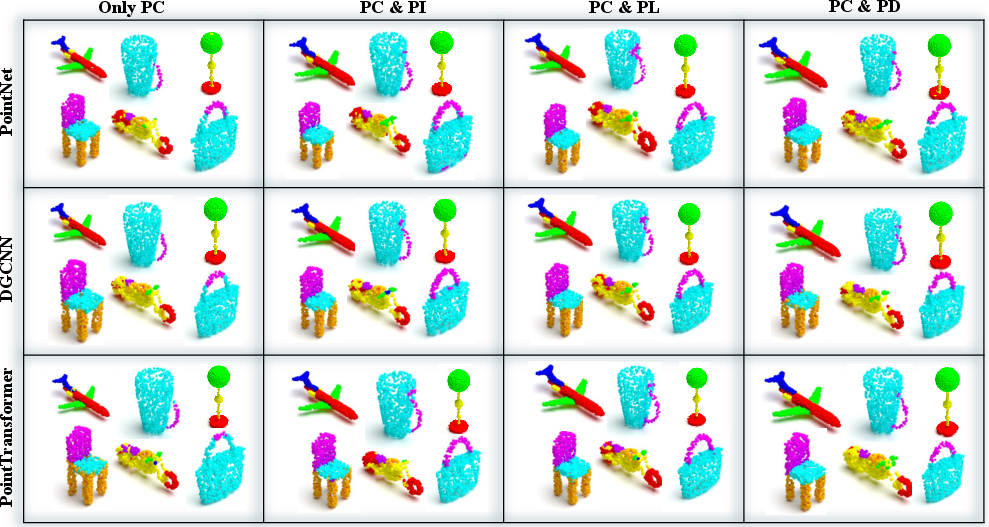
Figure 11: Visualizations of segmentations for multiple objects and architectures; PH input modalities yield improved coherence in fine parts.
The trade-off is a marked increase in training and inference time for PH-augmented models, especially as complex size and vectorization granularity grow, motivating further work on scalable and approximate PH computation.
Implications and Future Perspectives
This work establishes persistent homology as more than an auxiliary signal—it can function as a structural inductive bias throughout the learning system. The systematic design space clarifies that PH's benefits extend from robustness to invariance under isometric and sampling-induced perturbations, and that topological signals are orthogonal to local geometric representations.
The six injection points exemplify how PH can be deployed as an attention mechanism for sampling, an informant for receptive field reasoning, a criterion for self-supervised tasks, and a structural loss or calibration tool in prediction. The paper's empirical results—topological features yield consistent accuracy and part-consistency improvements—strengthen the case for a broad adoption of PH-centric learning.
Challenges remain, especially in the computational cost/scalability aspects, as well as the need for benchmarks with explicit topological labels and annotation. Looking forward, promising avenues include learned and task-adaptive filtrations, non-isotropic PH leveraging anisotropic metrics, neural approximations of persistence, PH-regularized foundation models, and systematic integration of PH into self-supervised pretraining protocols.
Conclusion
"A Persistent Homology Design Space for 3D Point Cloud Deep Learning" (2604.04299) provides a rigorous architectural framework, theoretical justification, and empirical evidence for treating persistent homology as a first-class component of geometric deep learning pipelines. By delineating a multi-dimensional design space of integration strategies and demonstrating the value of topological vectorization across point cloud tasks, the work establishes PH as an essential—and systemically underutilized—tool in 3D representation learning. The formalization of injection points unifies disparate strands in topological deep learning and sets the groundwork for principled exploration, benchmark development, and further architectural innovation targeting global, robust shape understanding.

