- The paper presents a closed-loop co-design architecture combining pre-flight planning, adaptive control, and resource orchestration, achieving a 51.8% reduction in communication energy for single UAV operations.
- It employs novel techniques like Graph-of-Convex-Sets, digital twins, and packetized predictive control to mitigate network interference and ensure robust UAV performance.
- The study demonstrates that integrated communication-control optimization significantly enhances UAV navigation precision, energy efficiency, and swarm reliability under dynamic low-altitude conditions.
UAV Control and Communication Co-Design for the Low-Altitude Economy
Overview
The proliferation of the low-altitude economy has precipitated a large-scale deployment of cellular-connected UAVs spanning critical domains such as urban air mobility, logistics, and emergency response. This paper delineates the stringent operational requirements and idiosyncratic technical challenges associated with low-altitude UAV operations, and proposes a robust, closed-loop co-design architecture integrating communication and control. The presented framework merges strategic pre-flight planning, adaptive in-flight control, and network-level resource orchestration, and is validated through targeted case studies illustrating the impact of co-design on single UAV and swarm performance.
Applications and Technical Challenges
Emerging applications of low-altitude UAVs range from emergency rescue and high-precision monitoring to collaborative swarms and security patrols (Figure 1). These scenarios manifest heterogeneous and often extreme requirements in terms of URLLC, control precision, and energy constraints.
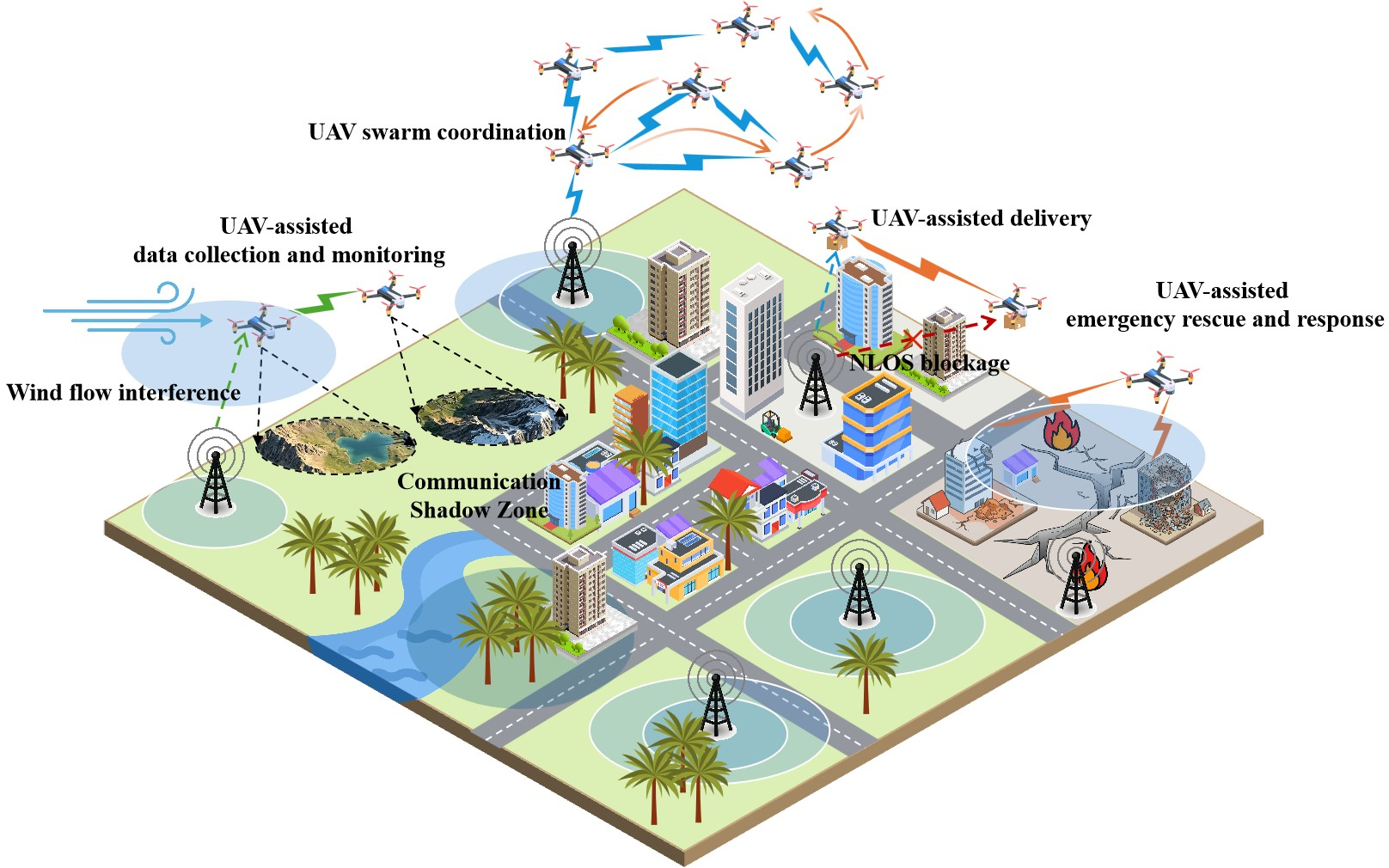
Figure 1: Illustration of emerging cellular-connected UAV use cases and their unique performance requirements across the low-altitude economy.
GCN integration offers decisive advantages over dedicated or satellite-based UAV networks in coverage, latency, and cost efficiency. However, the typical down-tilt of terrestrial antennas, severe multi-base-station interference, spectrum scarcity, and unpredictable coverage holes result in fundamental performance bottlenecks. Swarm scenarios dramatically intensify these issues due to increasing density, interference, and complex handovers.
Conventional research directions are fragmented along control-centric, communication-centric, or loosely integrated optimization lines, inadequate for capturing the deeply coupled dynamics between flight control and channel volatility in real-world low-altitude operations. This necessitates a tightly integrated, system-level architecture.
Closed-Loop Communication and Control Architecture
This work advances a resilient, three-layered architecture coupling communication and control across temporal and spatial domains (Figure 2). The pipeline consists of:
- Pre-flight Strategic Planning: Utilizes 3D radio maps and SINR-based constraints to optimize feasible trajectories that proactively avoid coverage blind spots and minimize handover volatility. Graph-of-convex-sets (GCS) and digital twin (DT) technologies facilitate deterministic coverage guarantees.
- In-Flight Adaptive Action: Implements state-aware, event/self-triggered predictive control mechanisms that dynamically adapt communication frequency and control packetization to local channel conditions and real-time control errors. Integration of ISAC leverages shared communication and sensing to enrich environmental awareness.
- System-Level Resource Orchestration: Executes real-time, control-oriented network scheduling that prioritizes URLLC resources by state estimation error, urgency of information (UoI), and value of information (VoI) metrics. Multi-agent RL is employed to forecast and mitigate emerging instabilities, preserving global swarm integrity.
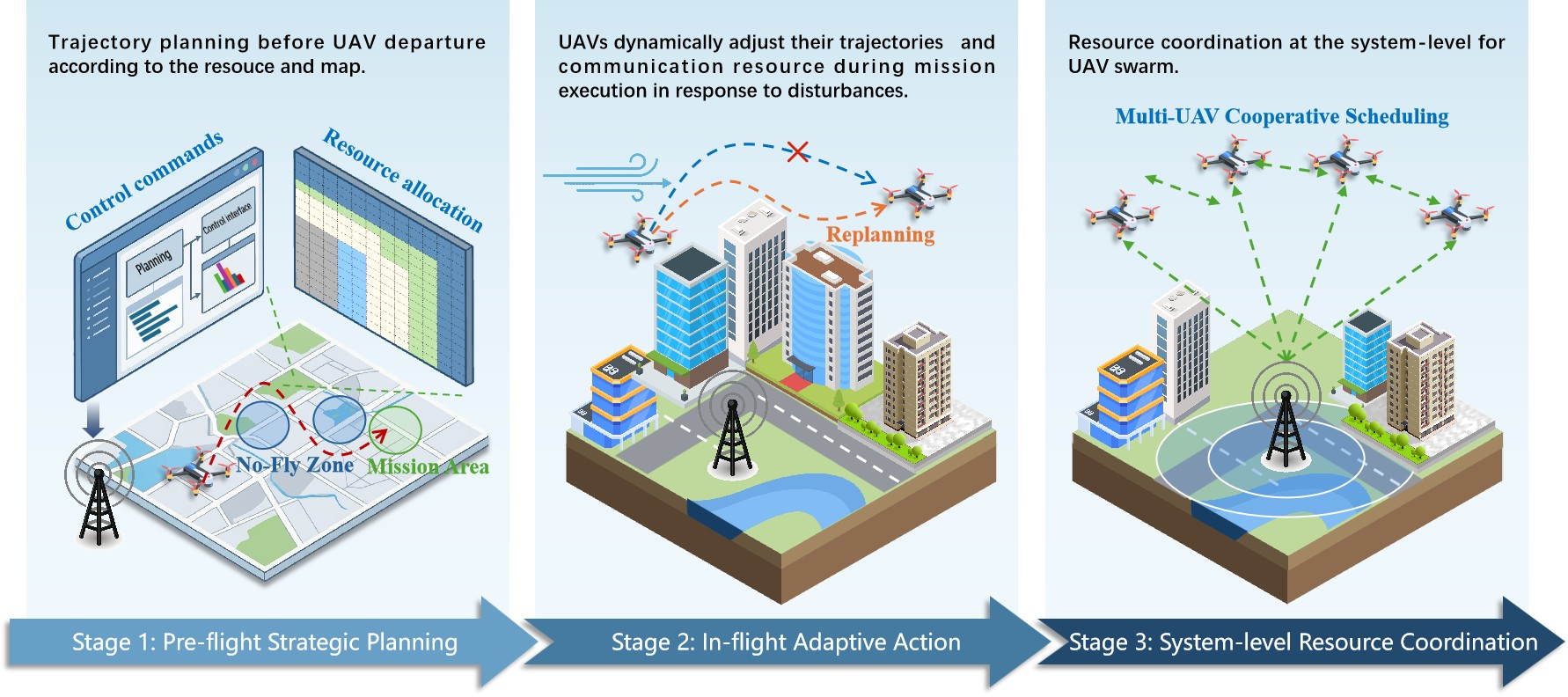
Figure 2: Overview of the proposed resilient co-design framework for cellular-connected UAV systems, integrating planning, adaptive control, and system-level feedback.
Key Technologies and Methodological Innovations
- GCS-based Trajectory Planning: Pathfinding over SINR-defined convex regions ensures global coverage reliability, augmented by continuously updated DTs for real-time electromagnetic risk modeling.
- Packetized Predictive Control (PPC) and Event/Self-Triggered MPC: Mitigates stochastic packet loss and network jitter, reducing control energy and spectral usage by triggering only under substantive state divergence.
- Integrated Sensing and Communication (ISAC): Dual-use waveform design delivers simultaneous communication and environment sensing, closing the control loop through direct channel state feedback.
- Control-Aware Resource Scheduling: Prioritizes constrained network resources to yield optimization for collective swarm safety rather than per-agent throughput, realized with MARL for proactive risk management.
Empirical Case Studies
The efficacy of the co-design framework is evidenced through two case analyses:
- Single UAV Adaptive Co-Design: A remote UAV controller leverages adaptive segment length control packets and self-triggered updates, dynamically balancing trajectory accuracy and communication burden across variable risk scenarios. The framework achieves a substantial 51.8% reduction in communication energy over conventional MPC without compromising navigation safety.
- Swarm-Level Context-Aware Scheduling: Swarm coordination under bandwidth constraints is optimized through urgency-aware scheduling, with communication opportunities adaptively granted to agents experiencing high control error or hazardous conditions. Results show that increasing simultaneous channel access markedly decreases collective control error, underscoring the necessity of real-time scheduling orchestration as swarm scale increases.
Implications and Future Research Directions
The proposed architecture has direct implications for the realization of robust, scalable low-altitude UAV networks. Practically, it offers demonstrated enhancements in navigation energy efficiency, swarm reliability, and spectral utilization under real-world network dynamics. Theoretically, it frames the low-altitude UAV communication-control problem as a fundamentally cross-layer, feedback-driven optimization challenge, motivating a reframing of standards in control theory, wireless networking, and autonomous systems.
Future research trajectories include:
- Full-stack Joint C3S (Computing, Communication, Sensing, Control) Optimization: Unified frameworks balancing environment, processing, and link constraints for holistic system performance.
- Distributed Protocols via Consensus and Decentralized Scheduling: Scaling system resilience with reduced signaling and lower sensitivity to local failures.
- LLM-Driven High-Level Decision Layers: Mapping unstructured mission descriptions to concrete, optimal control-communication strategies via multimodal LLMs.
- Space-Air-Ground Integrated Networking (SAGIN): Seamless terrestrial/non-terrestrial handoffs to close the remaining coverage gaps critical for ubiquitous low-altitude UAV operations.
Conclusion
This paper provides a rigorous blueprint for resilient, communication-control co-design in cellular-connected UAV systems, substantiated by strong empirical reductions in overhead and enhanced reliability across both single-agent and swarm settings. With advances in cross-layer optimization, real-time scheduling intelligence, and integrated sensing, these architectures represent a critical pathway toward scalable, intelligent, and robust low-altitude UAV network deployment.

