- The paper introduces a novel framework that integrates offline incremental learning with low-rank online adaptation to refine neural dynamics in real time.
- It leverages efficient second-order Gauss-Newton optimization and truncated SVD to update only 1% of network parameters, yielding up to 26% improvement in trajectory tracking.
- It demonstrates robust predictive control on quadrotor platforms under abrupt payload changes, ensuring rapid recovery and reliable tracking performance.
Adapting Neural Robot Dynamics on the Fly for Predictive Control
Motivation and Background
Accurate robot dynamics modeling is paramount for robust model-based predictive control in autonomous mobile platforms. Physics-based (white-box) models often fail to capture real-world complexities stemming from external disturbances, variable payloads, and actuator degradation. Data-driven (black-box) approaches, such as neural network models, offer increased flexibility but typically require extensive off-line datasets and are computationally expensive to adapt on the fly. Classical adaptive control schemes provide real-time compensation for structured model uncertainties but are limited by their parametric representation of disturbances. Recently, meta-learning and low-rank adaptation techniques have emerged for rapid fine-tuning in machine learning, though their deployment in real-time robot dynamics adaptation has been constrained by onboard computational resources.
Methodological Framework
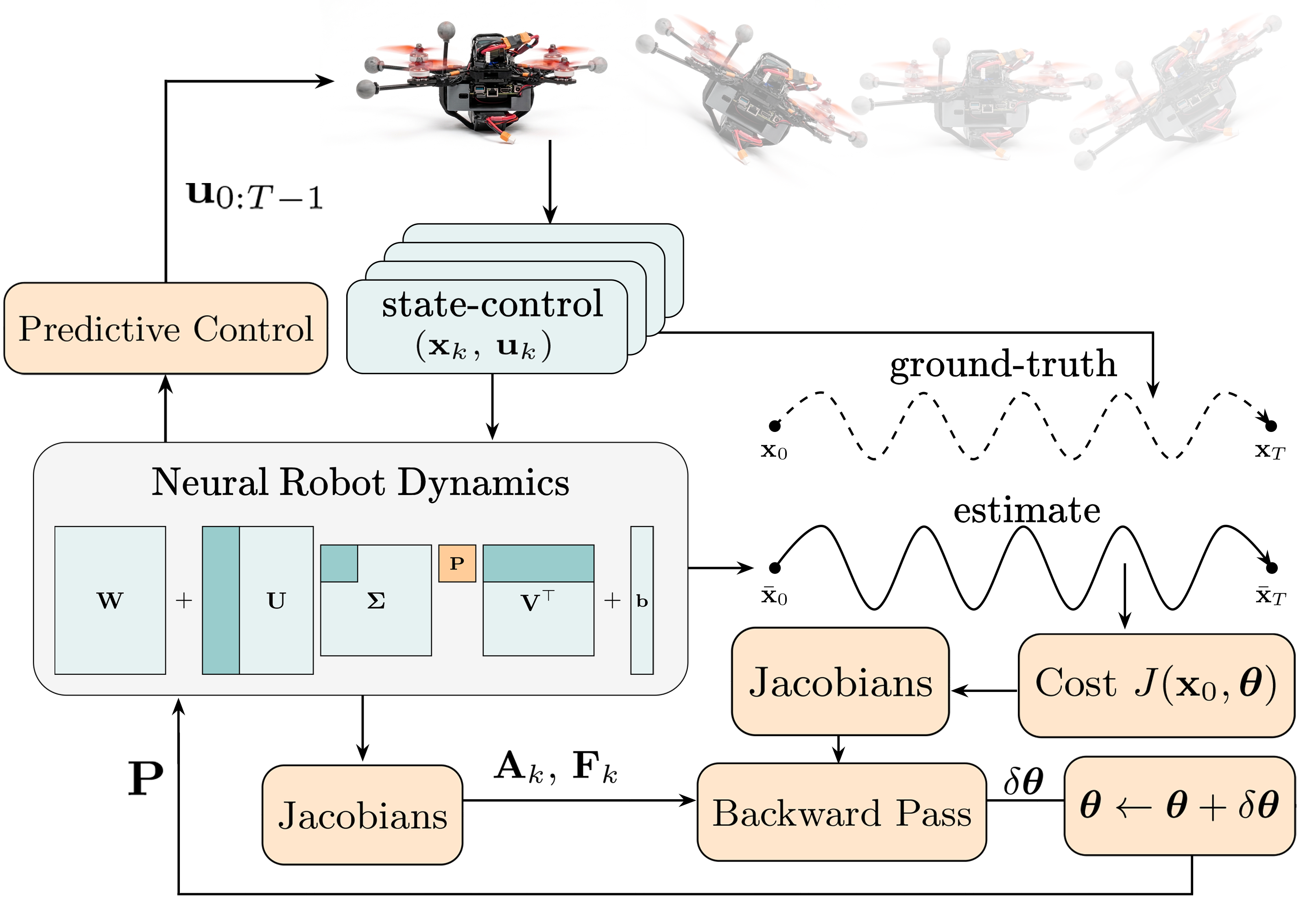
This work proposes an integrated architecture for on-the-fly neural dynamics adaptation and predictive trajectory tracking control, focusing on quadrotor robots subject to abrupt environmental changes (e.g., payload variations). The approach is composed of three principal stages:
Model Training and Benchmarking
The model is pre-trained using simulated trajectories from a quadrotor platform. The dataset covers a diverse range of positions, orientations, velocities, and angular velocities, and is normalized to avoid bias from state magnitude.


Figure 2: Distribution of state and velocity features in training and validation sets used for offline neural dynamics model learning.
Windows of length T=10 (0.1s) are used for sequential rollouts, and multi-step prediction errors are reported. The model achieves a position RMSE of 0.06m, orientation RMSE of 0.10rad, linear velocity error of 0.26m/s, and angular velocity RMSE of 0.40rad/s over a 0.5s horizon, demonstrating generalization beyond the training window.
Real-Time Adaptation: Experimental Validation
The system is deployed on a resource-constrained quadrotor platform, with embedded CPU-only computation for real-time adaptation and predictive control. An additional payload equal to 35% of the robot's mass is attached to induce model mismatch. Online adaptation is performed using a rank p=5 truncation for parameter updates—reducing the tunable subset to about T=100 of the total network weights, allowing for efficient execution within control cycles.
Figure 3: Quadrotor adapting to a 35% payload increase while tracking a reference trajectory.
Adaptation improves position tracking RMSE by 21% (lemniscate trajectory) and 26% (circular trajectory) compared to the non-adaptive model, with heading RMSE remaining comparable since disturbance primarily affects translational dynamics.



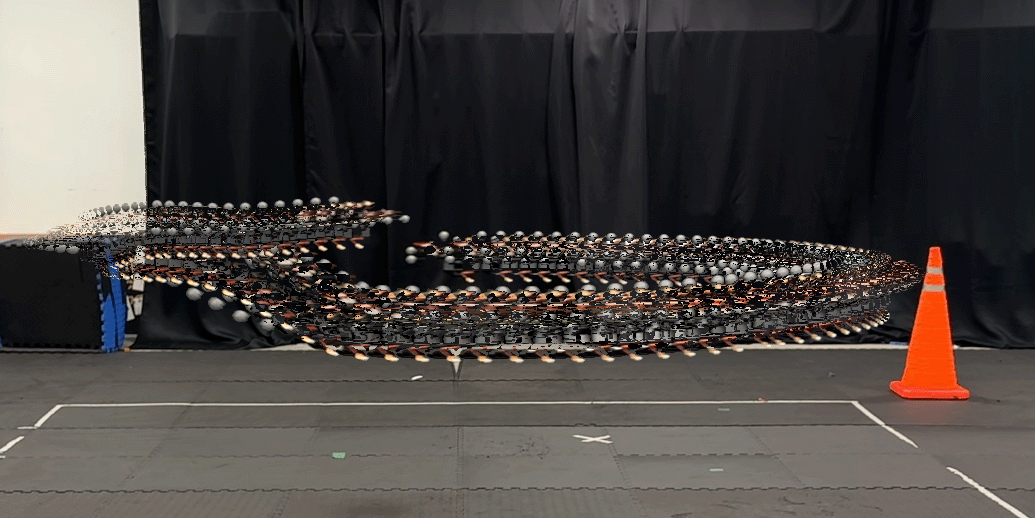
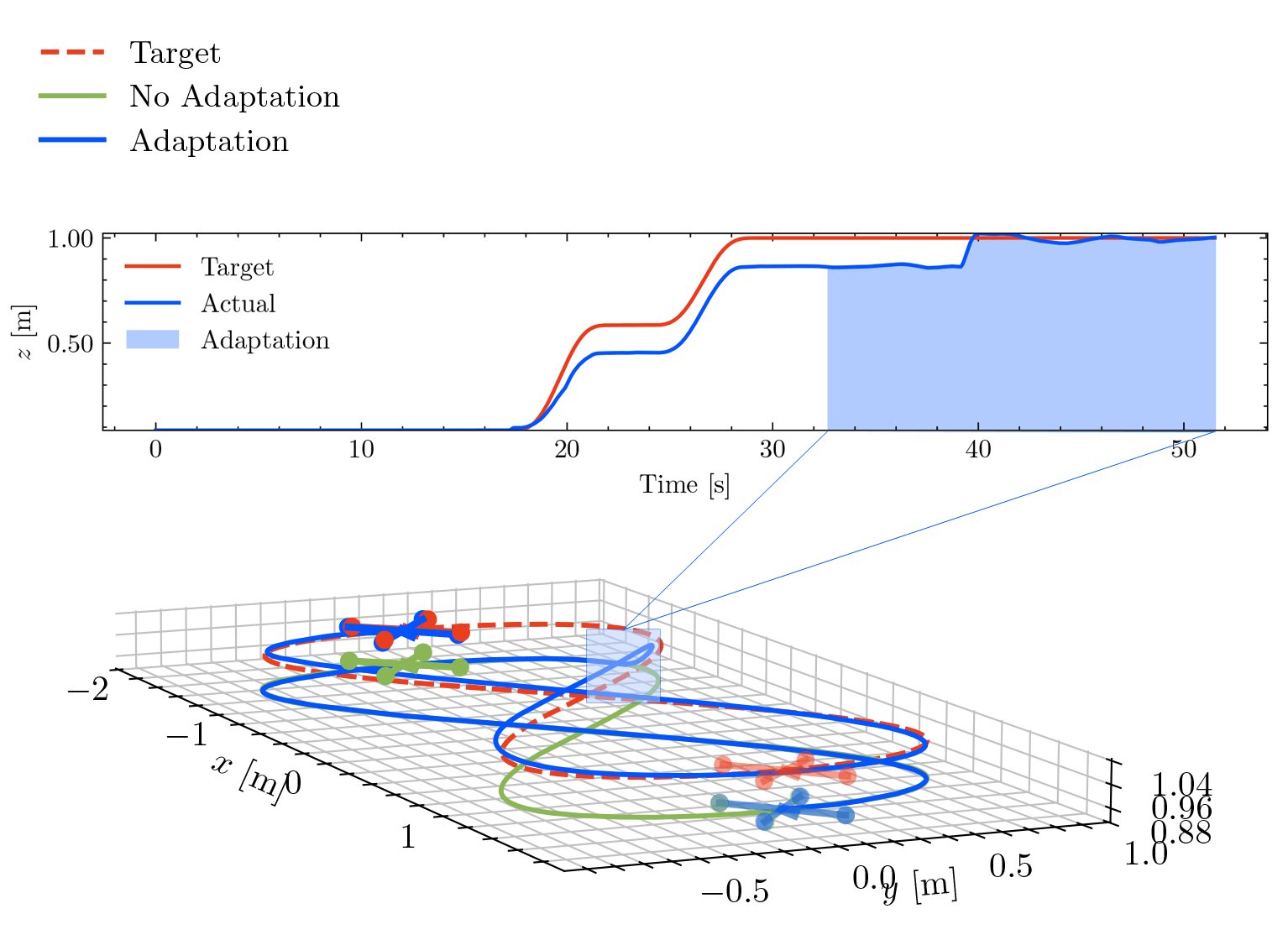
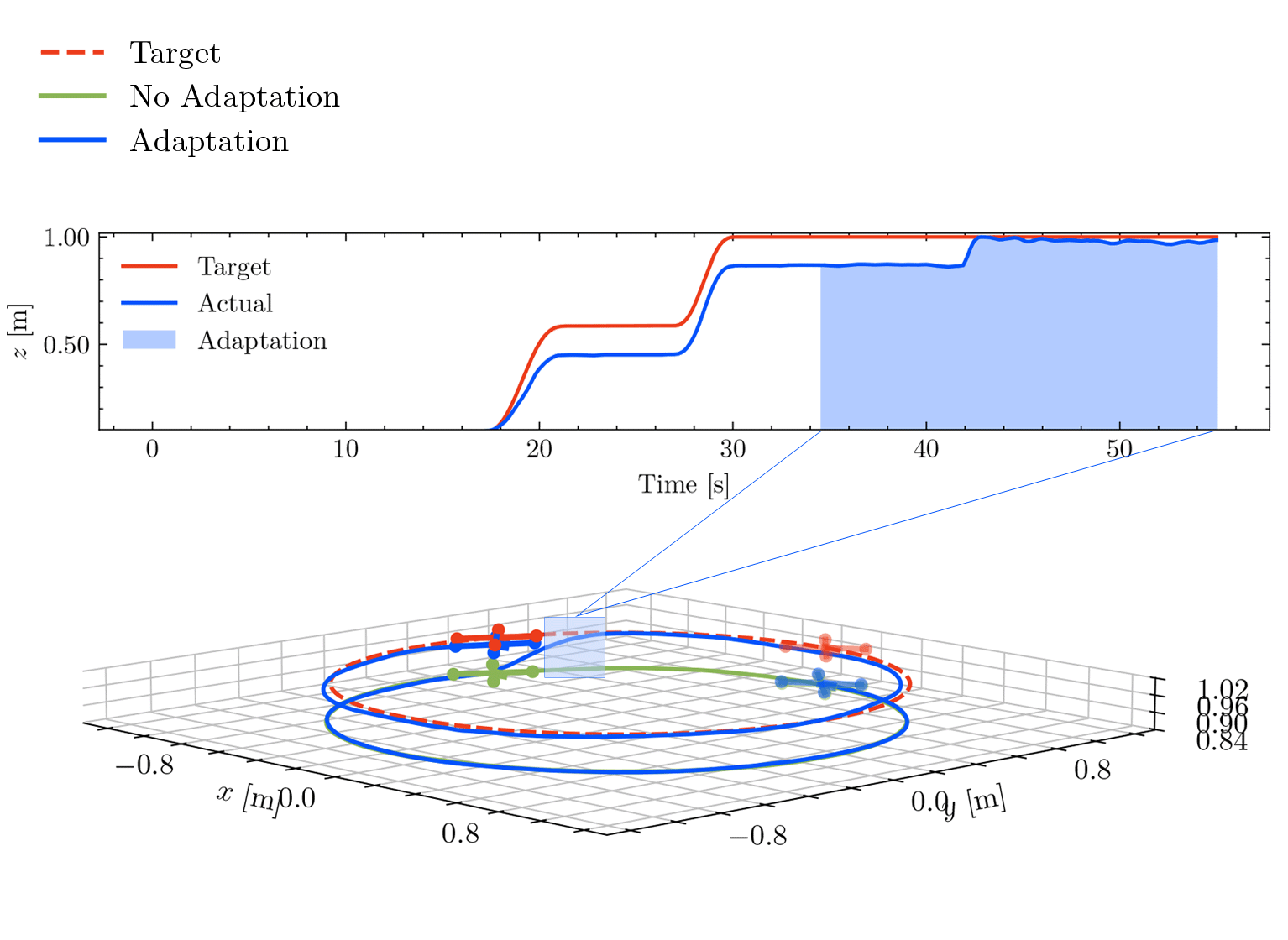
Figure 4: Quadrotor tracking performance on lemniscate and circular trajectories with and without online adaptation under a 35% payload increase.
Numerical Results and Claims
The following strong numerical results are reported:
- Position RMSE: T=101 (adapted) vs T=102 (non-adapted) for lemniscate; T=103 (adapted) vs T=104 (non-adapted) for circle trajectory.
- Parameter Efficiency: Fast adaptation is achieved by updating only T=105 of total NN parameters at ranks T=106, with no observed loss of expressivity on real-world tasks.
- Robust Control Performance: Online adaptation allows for rapid compensation of large unmodeled changes, converging to the desired altitude within T=107 post-disturbance.
Bold claims in the paper include:
- The method achieves robust predictive tracking control in novel operational conditions without full retraining or large dataset requirements.
- Low-rank second-order adaptation enables real-time on-board deployment on resource-constrained hardware, circumventing the computational bottleneck of conventional meta-learning.
Practical and Theoretical Implications
Practically, this framework advances onboard adaptive control capabilities for autonomous robots operating under unpredictable structural changes and disturbances, eliminating the need for a priori model specification or expensive full-network retraining. Theoretically, it sets a precedent for combining low-rank adaptation and second-order optimization for state-dependent neural dynamics learning, with implications for scalable adaptive control as neural architectures become more prevalent in robotics.
Further development could extend this architecture to other robot modalities and environments, employing visual and proprioceptive feedback for broader disturbance modeling. The integration with vision-based state estimation may enhance generalization to more complex, unstructured environments. The use of low-rank adaptation underscores the possibility of principled parameter space restriction for efficient fine-tuning in nonlinear systems control.
Conclusion
This paper introduces a highly efficient method for online neural dynamics adaptation and predictive control, combining offline incremental model learning with low-rank second-order parameter updates. The empirical results highlight substantial improvements in quadrotor trajectory tracking under significant model mismatch, with minimal computational overhead and robust safety margins. The proposed approach is likely to impact future adaptive robotics control systems, possibly extending to multi-modal sensor fusion and broader disturbance regimes.