- The paper identifies conditions under which the unconstrained LQR achieves complete decentralization, enabling each subcontroller to act solely on local state information.
- It derives explicit algebraic criteria using the Algebraic Riccati Equation for 2x2 systems and extends these insights to spatially invariant and higher-order systems.
- Empirical results demonstrate that decentralized controllers can reach optimal H2 performance, challenging the notion that decentralization compromises overall control efficacy.
Conditions for Complete Decentralization in Linear Quadratic Regulators
Overview
This paper investigates the precise conditions under which the unconstrained Linear Quadratic Regulator (LQR) admits a completely decentralized optimal policy. In a completely decentralized control law, each subcontroller computes its actuation signal using only state information directly accessible to it—eliminating the need for inter-subcontroller communication. The study bridges algebraic analysis of the Algebraic Riccati Equation (ARE) and physical interpretations using illustrative examples, expanding prior isolated results toward a systematic characterization for both simple and complex interconnected systems.
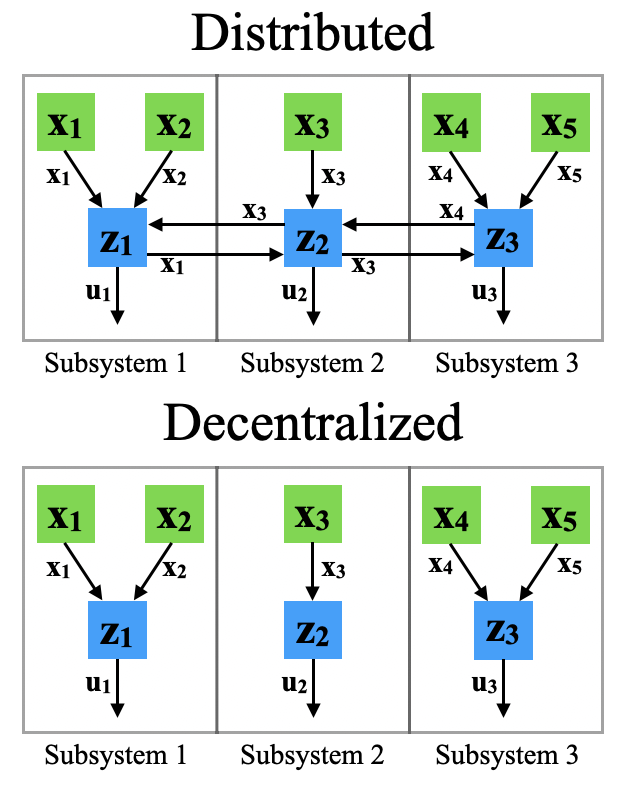
Figure 1: Visualization of distributed (top) and decentralized (bottom) control policies for three subsystems, highlighting the complete informational autonomy of the decentralized scenario.
Theoretical Foundations
The LQR problem is analyzed for systems described by x˙=Ax+Bu, with an infinite-horizon quadratic cost J=∫0∞x⊤Qx+u⊤Rudt. The unconstrained optimally minimizing policy is u∗=Kx with K=R−1B⊤P, where P solves the ARE. Complete decentralization is defined as K being diagonal (or block-diagonal in the structured case), ensuring that each control input ui relies solely on xj entries available locally.
A trivial case occurs when A,B,Q,R are all diagonal—decoupled dynamics ensure K is also diagonal and hence decentralized. However, a central contribution of this work is rigorously identifying and interpreting nontrivial scenarios where J=∫0∞x⊤Qx+u⊤Rudt0 is not diagonal, yet decentralization persists and is optimal.
J=∫0∞x⊤Qx+u⊤Rudt1 Systems: Sufficient Conditions and Physical Interpretations
For J=∫0∞x⊤Qx+u⊤Rudt2 systems with diagonal J=∫0∞x⊤Qx+u⊤Rudt3 and arbitrary J=∫0∞x⊤Qx+u⊤Rudt4, the paper presents explicit algebraic criteria for complete decentralization, summarized as follows:
- Opposite signs of off-diagonal terms (J=∫0∞x⊤Qx+u⊤Rudt5 and J=∫0∞x⊤Qx+u⊤Rudt6),
- Same signs of diagonal terms (J=∫0∞x⊤Qx+u⊤Rudt7 and J=∫0∞x⊤Qx+u⊤Rudt8),
- Suitable ratios among weights in J=∫0∞x⊤Qx+u⊤Rudt9 and u∗=Kx0 determined by u∗=Kx1 (derived through common roots of reduced scalar AREs).
These conditions possess an intuitive interpretation: when subsystems are in competitive interaction (e.g., predator-prey dynamics), each subcontroller—implementing an information-local policy—can, under these conditions and for certain cost assignments, achieve global optimality.
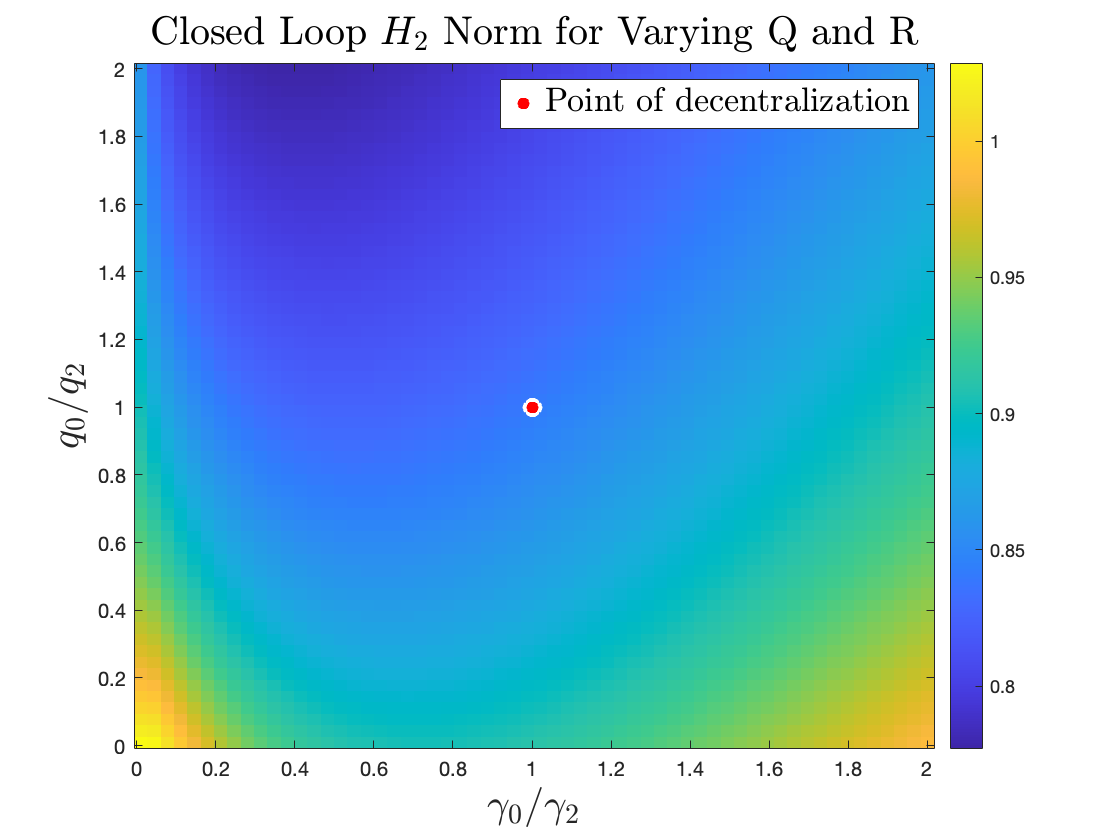
Figure 2: Heat plot of the closed-loop u∗=Kx2 norm against ratios of u∗=Kx3 and u∗=Kx4; red marker indicates parameters yielding decentralization.
Strong numerical evidence indicates no inherent trade-off between enforcing a decentralized solution and optimal u∗=Kx5 performance—decoupled operation can match or outperform more centralized solutions in appropriate regimes.
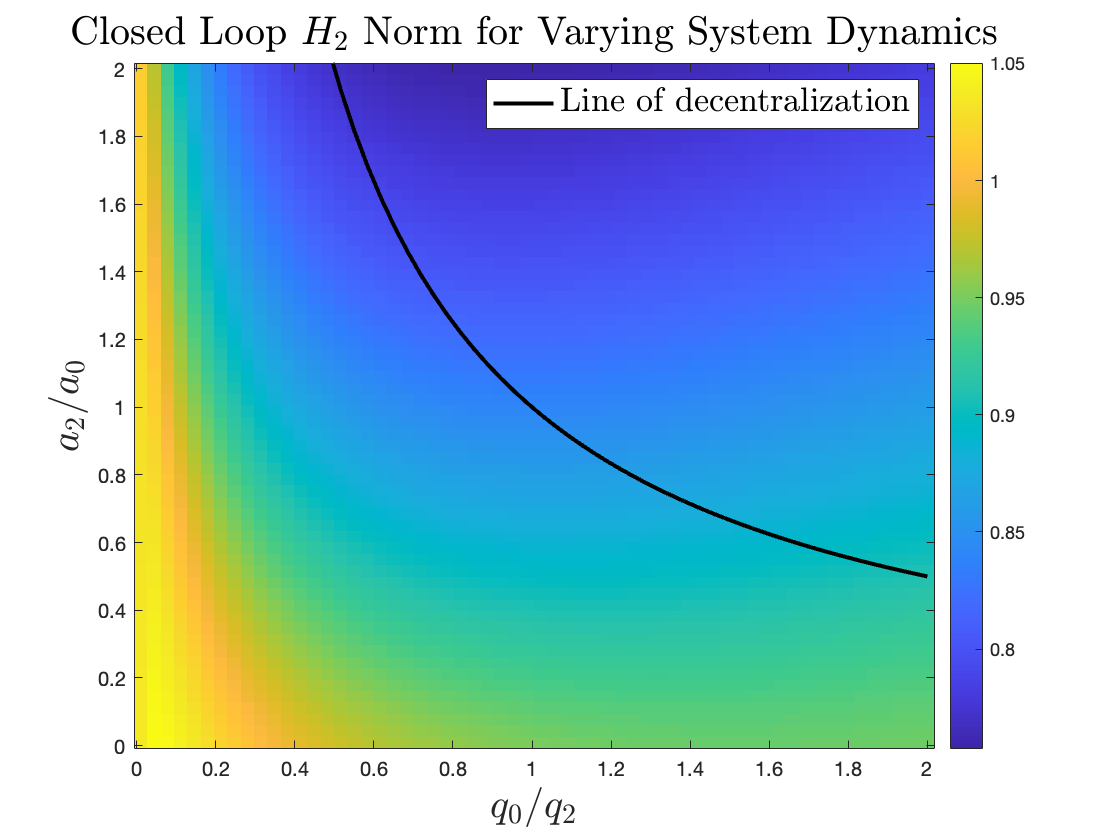
Figure 3: Variation in closed-loop u∗=Kx6 performance with u∗=Kx7 and u∗=Kx8; the curve (black) represents decentralized controller settings, spanning both low and high u∗=Kx9 norm regions.
Physical Example: Population Dynamics
The predator-prey (competitive) model is used to elucidate the conditions in a physical context. Here, each species' population can be directly manipulated, and the natural “competition” in their interaction matches the algebraic requirements for decentralized optimality. Carefully chosen state and input weights enable each subcontroller (managing a single species) to act independently without sacrificing optimality.
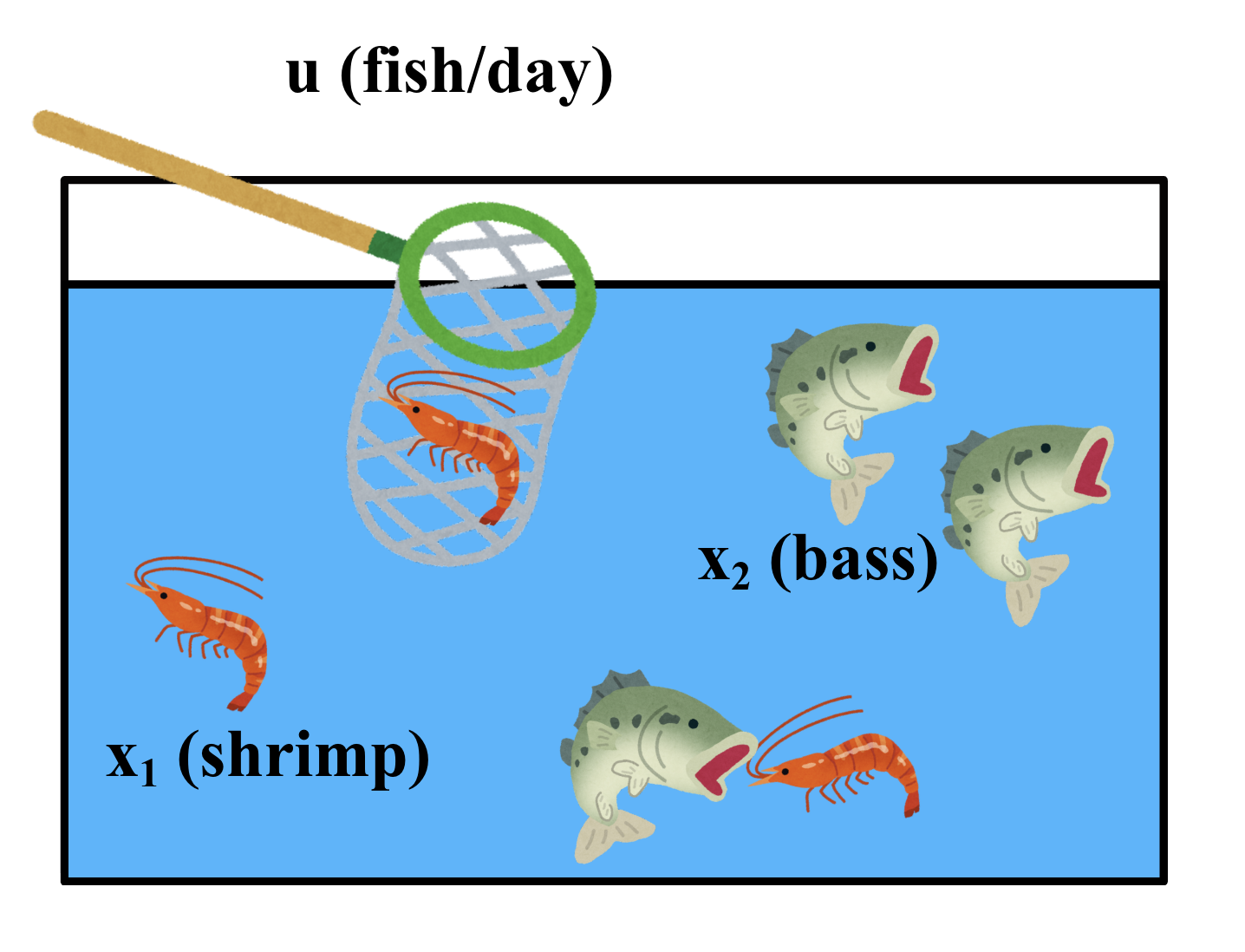
Figure 4: A two-species aquarium model where predator and prey populations interact, exemplifying dynamics conducive to complete decentralization.
Extension to Spatially Invariant Systems
The analysis generalizes to spatially invariant systems, where K=R−1B⊤P0 are (block-)circulant matrices. The decentralized LQR condition is translated into the frequency domain: all frequencies must share a common scalar solution in the associated family of frequency-parametrized AREs. This leads to a succinct necessary and sufficient algebraic criterion for complete decentralization, recoverable by design parameter selection.
For diffusive (cooperative) systems, such as discrete diffusion on a ring, the condition differs: decentralization necessitates coupled cost matrices. Diagonal K=R−1B⊤P1 and K=R−1B⊤P2 are insufficient; instead, state cost must penalize spatial differences (e.g., by including the Laplacian in K=R−1B⊤P3). This contrast to competitive cases is both algebraically and physically significant.
Higher-Order and Block-Structured Systems
For higher-order dynamics (second-order ODEs), the paper demonstrates that decentralization criteria can be recursively reduced to those for lower-order subsystems, using block-circulant algebra and iterative ARE resolution. Thus, complex systems can inherit decentralization if their constituent subsystems satisfy the foundational conditions—either competitive with decoupled costs or cooperative with appropriately coupled costs.
A concrete example is provided for a physical heat transfer scenario across a wall separating two chambers with localized heating elements. With proper alignment of system parameters and cost assignments, complete decentralization is shown to be attainable, even in the presence of cross-chamber thermal coupling.
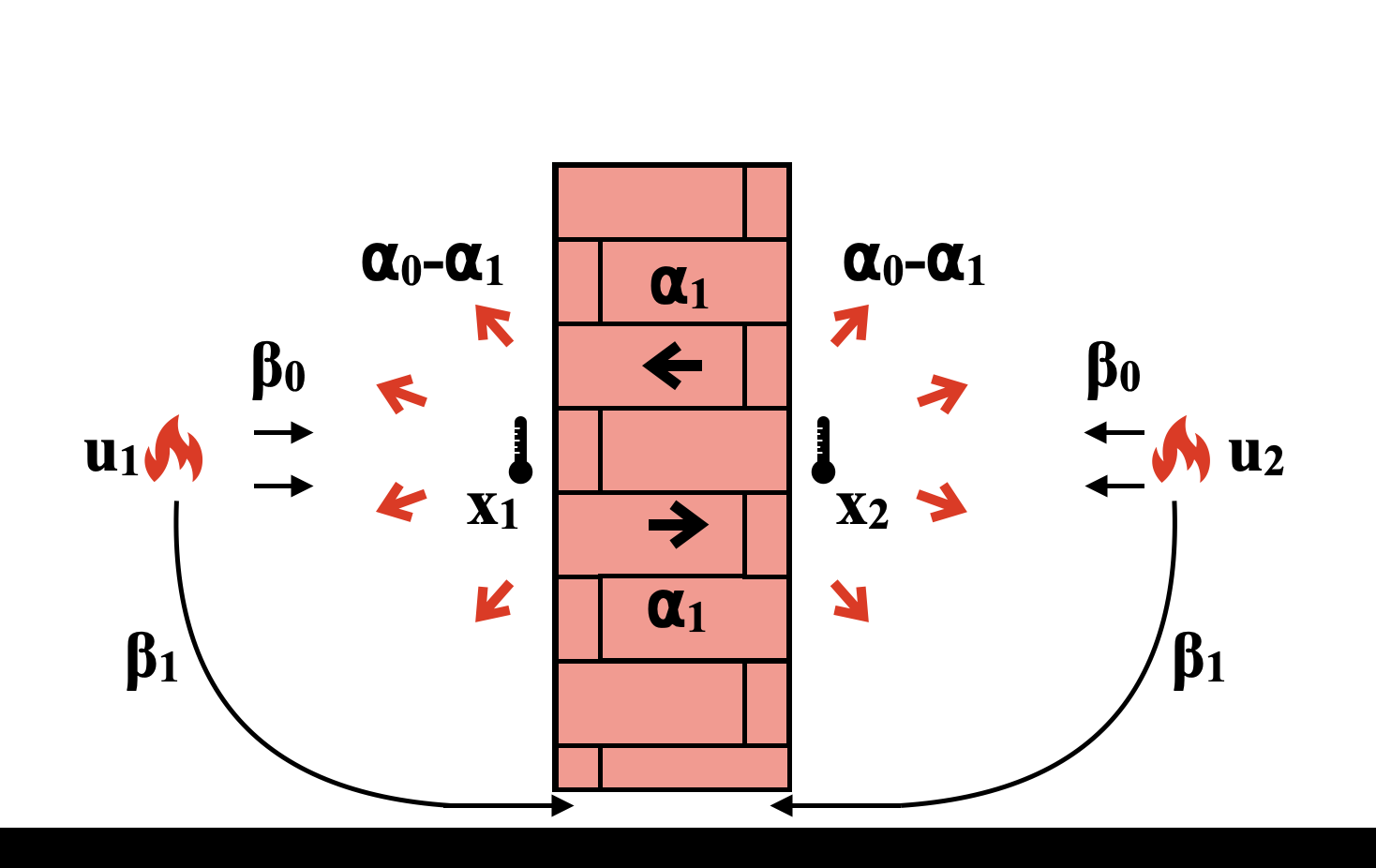
Figure 5: Physical illustration of heat transfer between two connected thermal chambers, demonstrating conditions for decentralized thermal regulation.
Empirical examination of the closed-loop K=R−1B⊤P4 norm surfaces over design parameter spaces confirms that parameter choices resulting in decentralized controllers do not inherently result in degraded performance. Indeed, decentralized designs can reside at arbitrary locations along the performance frontier, dismantling the presumed dichotomy between locality and optimality for these classes of systems.
Furthermore, the study’s results imply crucial implications for control-system co-design: one can intentionally select plant and controller parameters to achieve decentralization with no performance penalty, a powerful insight for scalable cyber-physical system design.
Conclusion
The paper delivers a detailed algebraic and physical characterization of when and how the LQR can be rendered completely decentralized through appropriate plant and cost structure selection. The distinction between competitive versus cooperative coupling, and the necessity (or not) of coupled weighting, is clearly established in multiple canonical settings. In addition, the findings demonstrate that decentralization is compatible with high performance, contradicting assumptions about inevitable tradeoffs.
The work opens several directions for future research, including an exact necessary and sufficient characterization across broader classes of dynamics, exploration of other optimal control policies (K=R−1B⊤P5), robustness analysis, and formal links between locality and global performance in distributed systems.
Reference: "Conditions for Complete Decentralization of the Linear Quadratic Regulator" (2604.03490)

