- The paper presents a hybrid framework that combines Bayesian Hilbert Maps and local Gaussian Process regression to achieve real-time SDF, gradient, and uncertainty estimation.
- It employs spatial octree partitioning with localized kernel regression and a log-GPIS formulation to efficiently reconstruct surfaces and adaptively learn sign thresholds.
- Experimental results on synthetic and real-world datasets demonstrate improved reconstruction fidelity, robust noise handling, and rapid update times (<200ms/scan) for autonomous navigation.
Kernel-SDF: A Library for Real-Time SDF Estimation with Kernel Regression
Motivation and Context
Accurate, scalable, and uncertainty-aware geometric environment representation is essential for autonomous robotics tasks including motion planning, navigation, and manipulation. Among the diverse set of representations, Signed Distance Functions (SDFs) offer unique advantages, serving as a continuous implicit representation that is differentiable, supports efficient collision queries, and provides geometric information required by modern robotic planners. However, existing SDF reconstruction algorithms introduce fundamental limitations: voxel-based methods are computationally efficient but constrained by fixed grid resolution and lack calibrated uncertainty quantification; neural network methods are expressive and differentiable but not suitable for rapid online adaptation; Gaussian Process (GP)-based SDF learning achieves probabilistic regression but suffers from poor scalability, imprecise sign estimation, and unreliable uncertainty quantification.
To address these challenges, this study presents Kernel-SDF, an open-source real-time system that couples kernel-based regression (BHM) for robust occupancy/sign and surface estimation with local GP regression for SDF inference, all optimized for computational efficiency via spatial octree partitioning and parallel updates. Unlike previous works, Kernel-SDF simultaneously provides SDF value, gradient, and calibrated uncertainty in real time, with direct experimental evidence of improved reconstruction, uncertainty consistency, and suitability for closed-loop robotics.
System Architecture
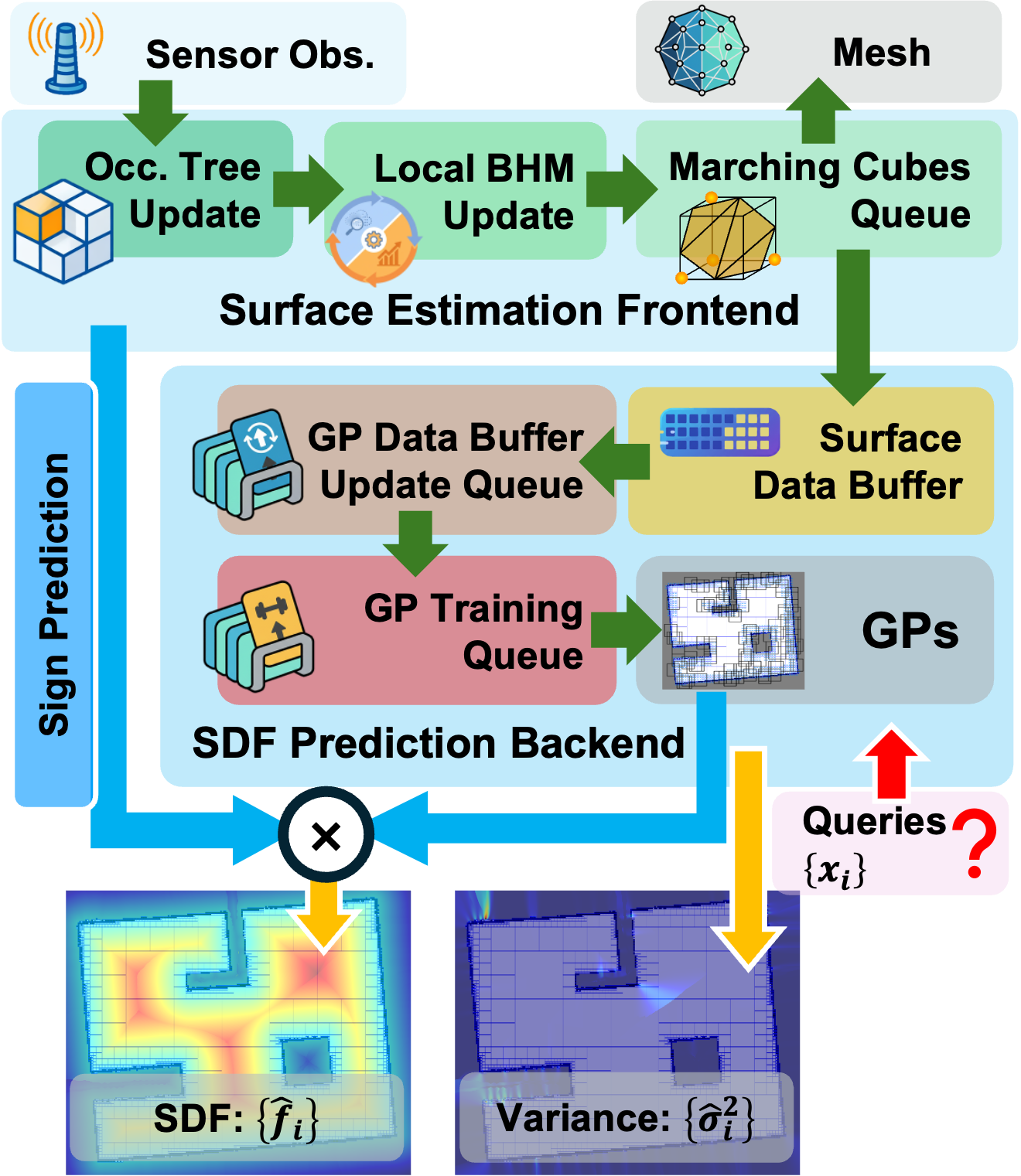
Kernel-SDF constructs SDF representations from streaming LiDAR or depth imagery using a two-stage hierarchical design:
Algorithmic Techniques
Bayesian Hilbert Maps (BHM) for Sign and Surface Estimation
Each BHM models the log-odds of occupancy via kernel regression and is updated online with EM-based moment updates and expectation-maximization. Key extensions include diagonal covariance for scalable EM updates, kernel sparsification, and weight sharing for octant boundary consistency. The log-odds field is used to adaptively learn the sign/SDF zero level-set threshold, enhancing robustness to varying sensor directions and environmental conditions. Marching cubes is used for surface extraction, with each point's uncertainty computed analytically based on local field gradient and deviation from the estimated isosurface.
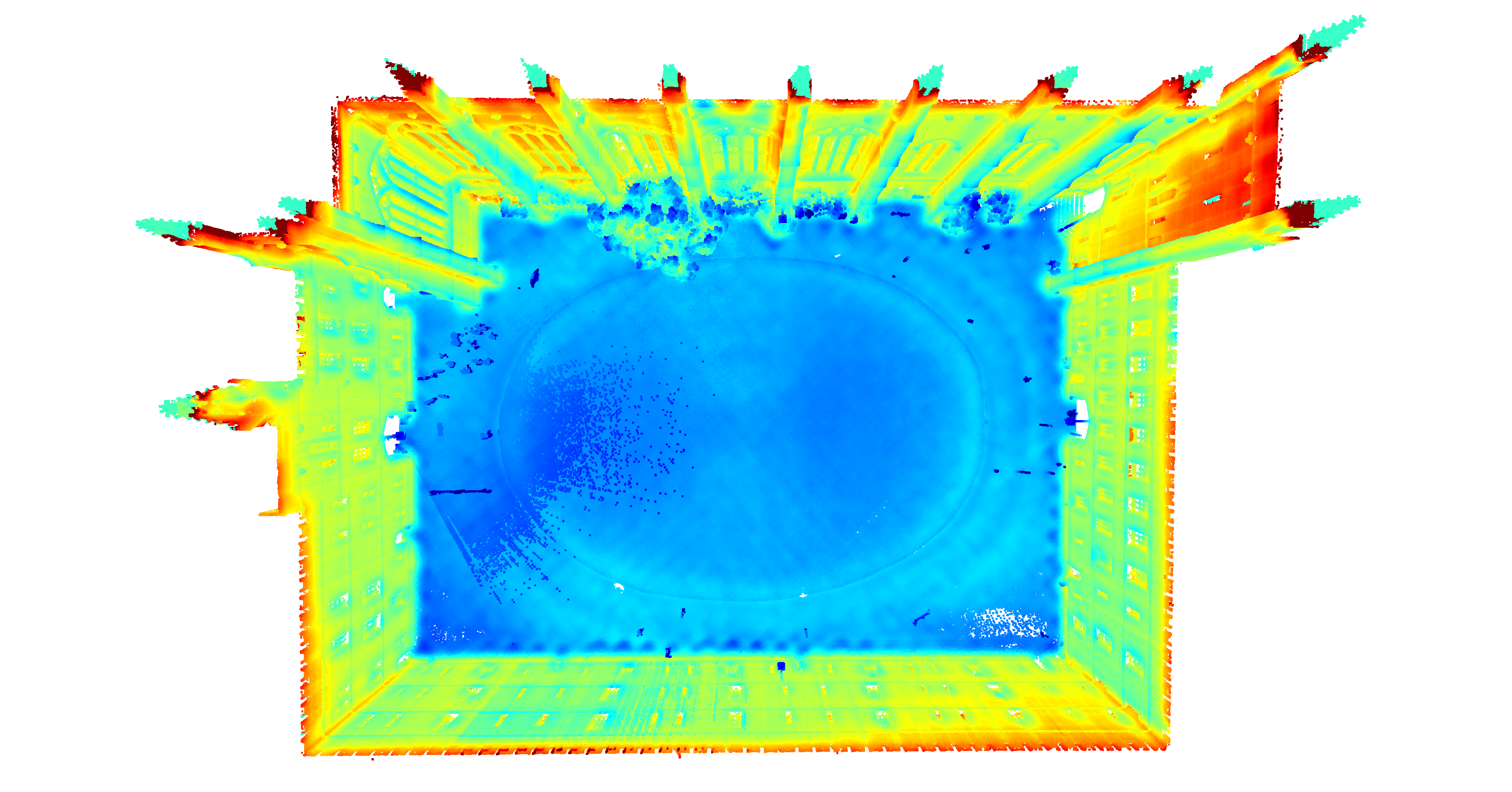
Figure 2: Visualization of surface log-odds. Ground and wall log-odds distributions demonstrate adaptivity of sign estimation.
Local GP Regression and Softmin-Based Fusion
Local GP regression on surface samples leverages the log-GPIS framework (connecting the heat kernel to the unsigned SDF for small-kernel-scale regimes) and supports multiple kernels for improved numerical performance and analytic inversion. Training data and prediction pipelines are buffered and updated asynchronously using priority queues to balance responsiveness with computational cost. The SDF and its derivatives are produced efficiently, and estimates from neighboring octants are fused via analytic softmin composition, ensuring both accuracy and computational stability.
Uncertainty Quantification
Kernel-SDF circumvents variance explosion away from training data (an endemic issue in standard GPs) by explicitly propagating input uncertainty through the softmin SDF approximation, yielding SDF and gradient uncertainty that reflect both surface extraction confidence and spatial query locality.
Empirical Evaluation
Kernel-SDF is evaluated against leading alternatives (Voxblox, FIESTA, iSDF, VDB-GPDF) across synthetic (Replica), real-world (Cow & Lady), and large-scale (Newer College) datasets. Analyses span qualitative and quantitative accuracy, computational cost, and uncertainty calibration.
Reconstruction and SDF Accuracy
Kernel-SDF consistently produces surface reconstructions with fewer discretization artifacts and greater geometric fidelity relative to grid/voxel-based models, and avoids the excessive over-smoothing observed in neural implicit methods. Quantitative metrics demonstrate lower mean absolute error (MAE) for both SDF values and gradients, with particularly robust performance in near-surface regions critical for manipulation and locally optimal control.
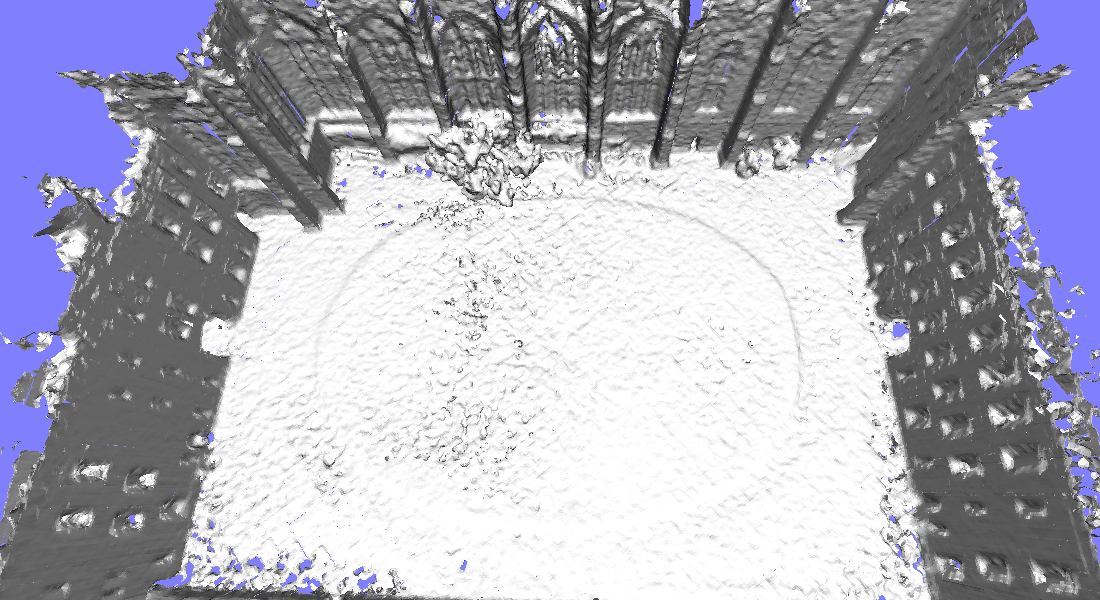
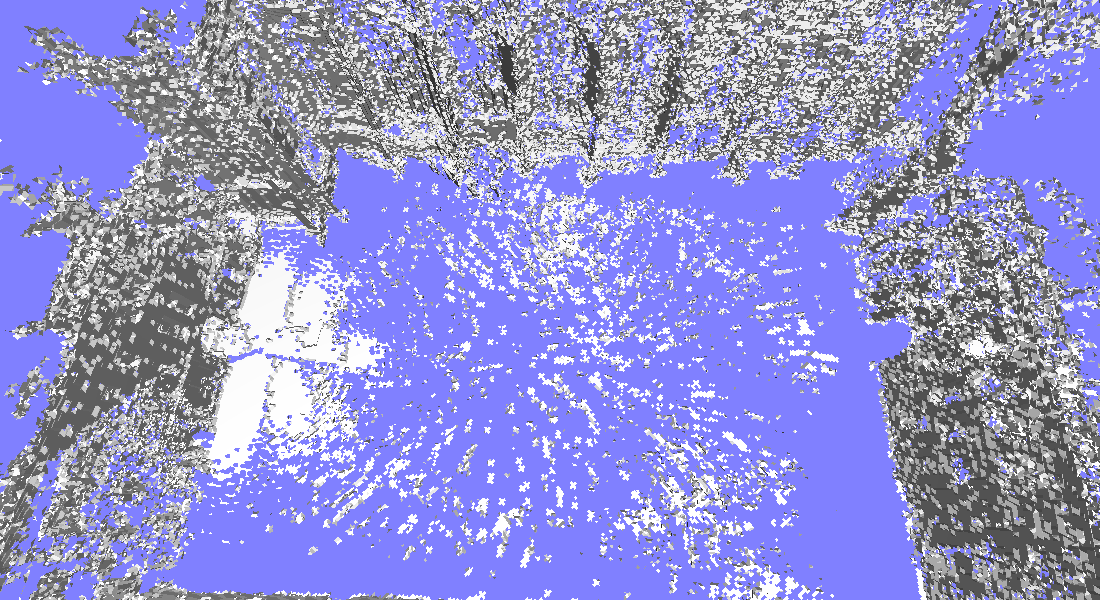
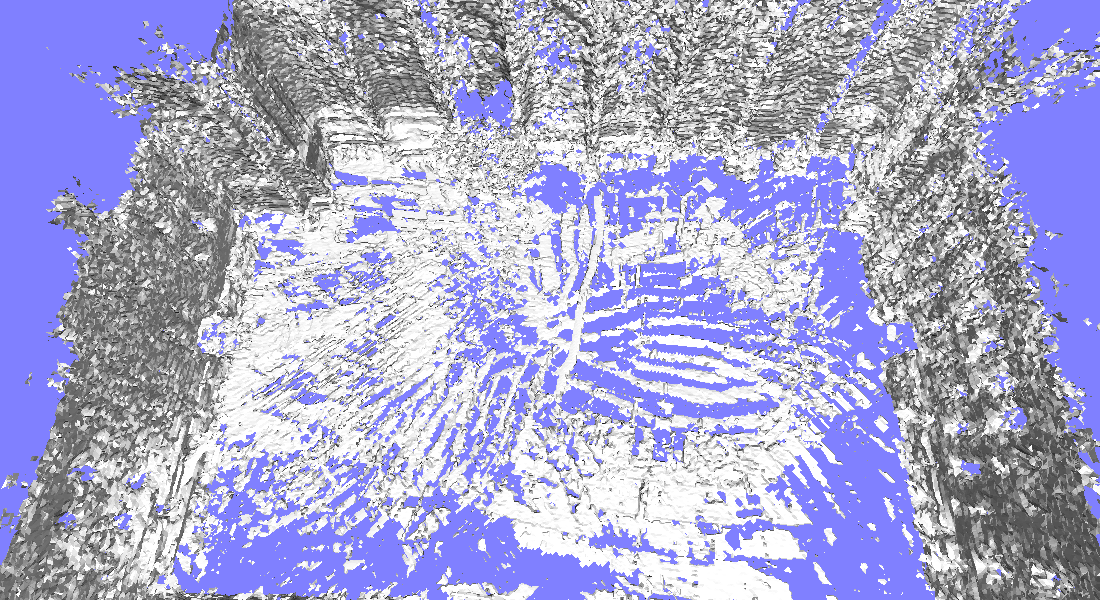
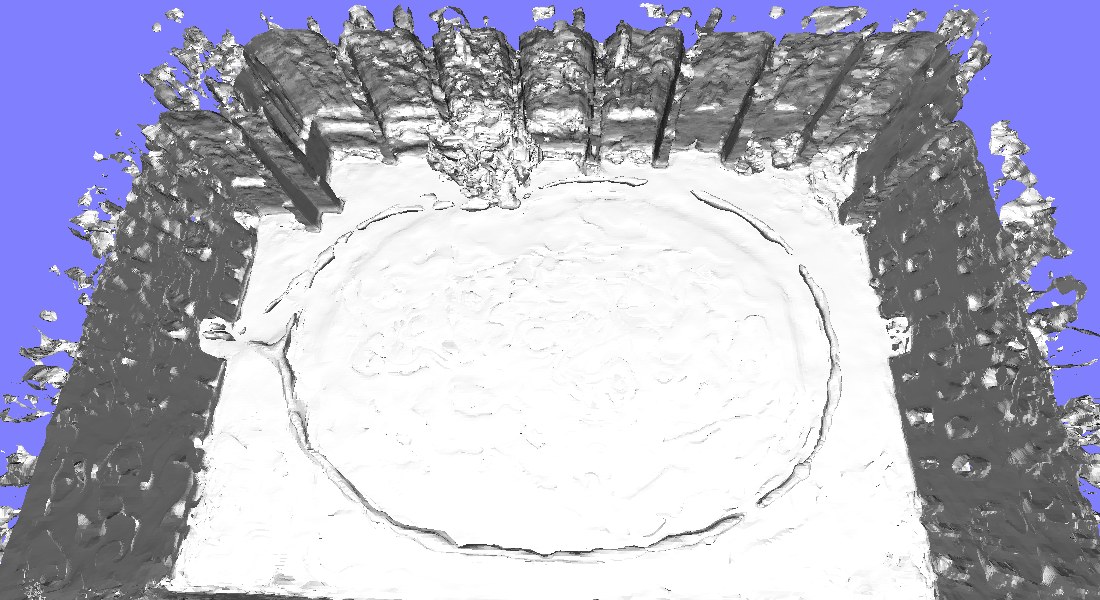
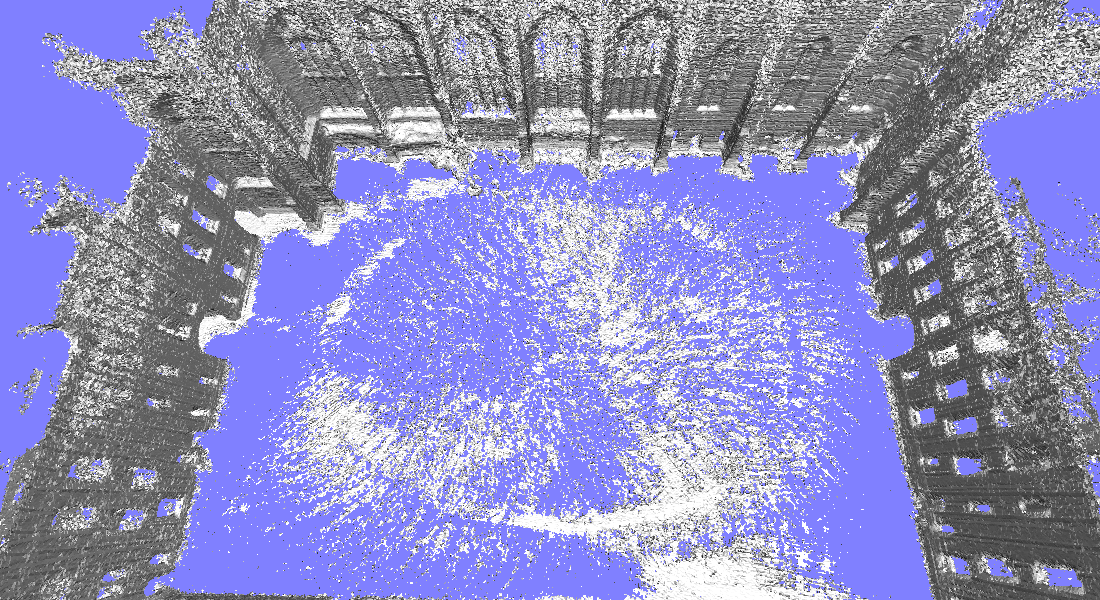
Figure 3: Mesh reconstruction for the Cow and Lady dataset. Kernel-SDF preserves fine geometry (horns, ears, legs) where baselines fail.
Efficiency
The combination of octree partitioning, delayed/batched updates, and optimized kernel implementations results in real-time performance (update times <200ms/scan) on all tested scene scales, outperforming grid-based GPU methods and neural network approaches in both update and query throughput.
Uncertainty Calibration
Spatial correlation between estimated SDF variance and actual error is confirmed, indicating that Kernel-SDF’s uncertainty quantification is reliable—a critical property for safety-aware planning and risk-sensitive control.
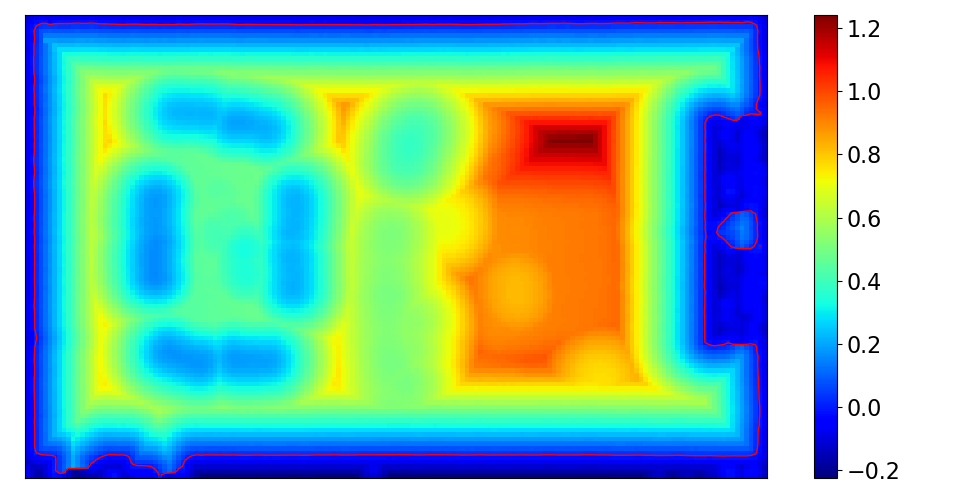
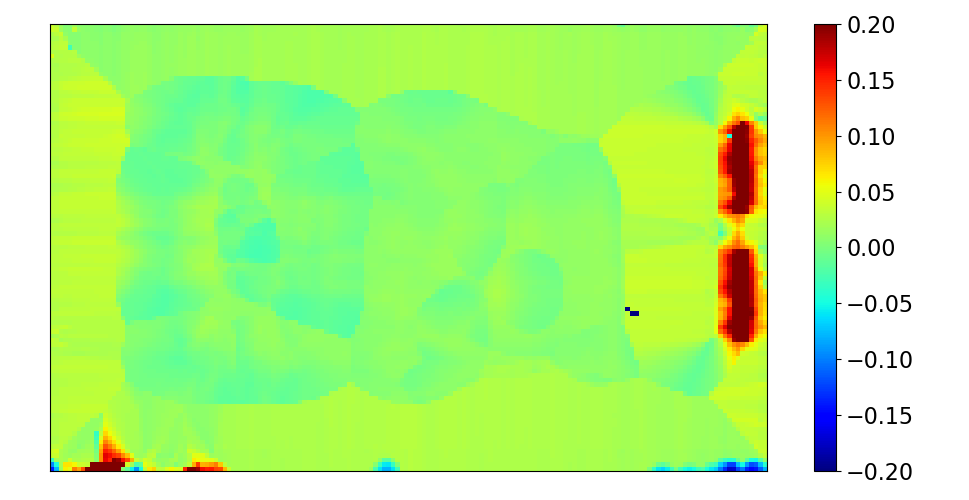
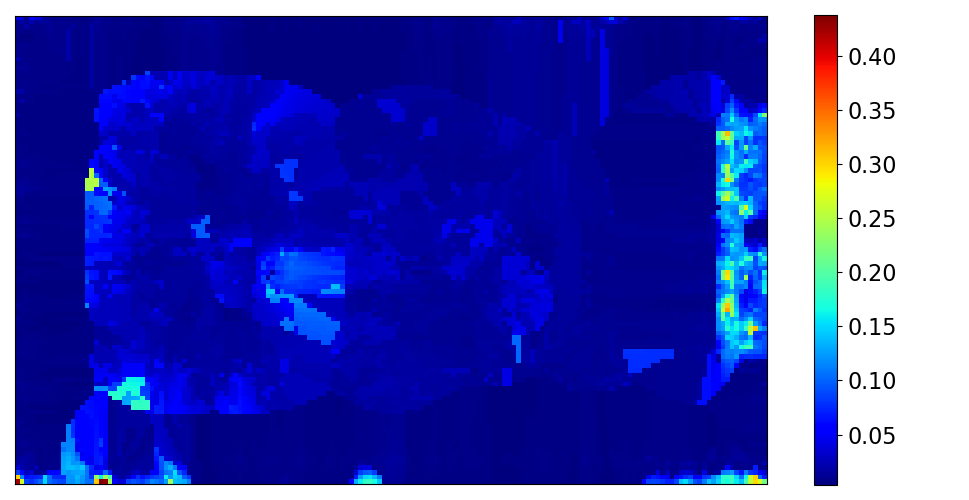
Figure 4: SDF predictions in Replica Office3 demonstrate finely resolved distance information for downstream planning.
Robustness to Sensor Noise
Ablation studies under varying axial noise levels confirm Kernel-SDF’s resilience, with only gradual degradation in mesh/SDF quality as noise increases, attesting to the front-end’s ability to filter noisy data and propagate calibrated uncertainty for robust downstream use.
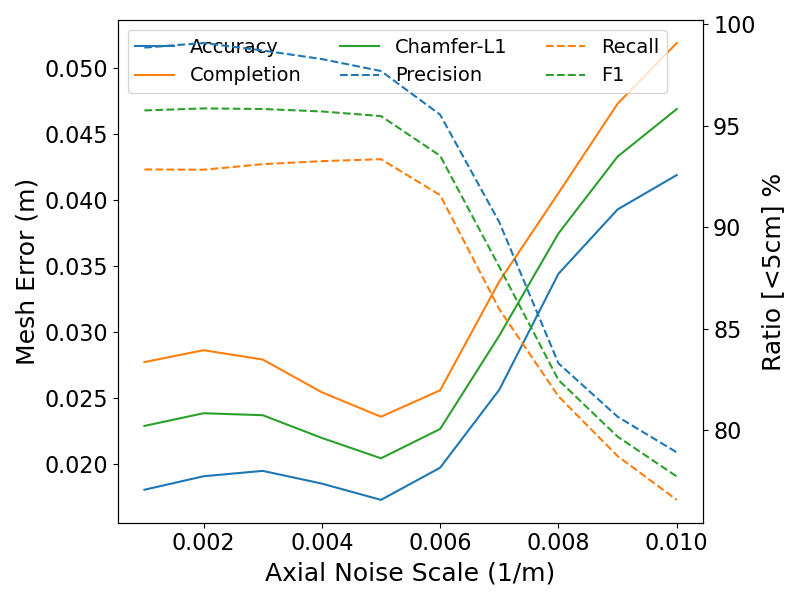
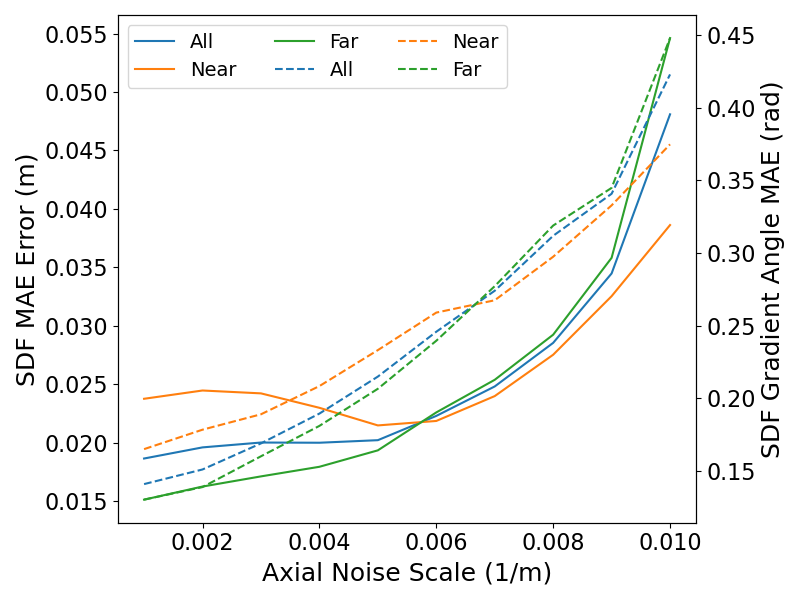
Figure 5: Mesh quality as a function of sensor noise level confirms robustness of Kernel-SDF versus alternative methods.
Application to Autonomous Navigation
Real-world experiments with a LiDAR-equipped mobile robot validate practical utility: Kernel-SDF’s output enables construction of dynamic “safe bubble covers” and SDF-informed safe corridors, supporting risk-aware navigation and on-the-fly replanning.

Figure 6: Jackal robot utilizes Kernel-SDF to build safe navigation corridors in real-world laboratory environments.
Theoretical and Practical Implications
Kernel-SDF advances the intersection of probabilistic environment modeling and real-time robot operation by (1) demonstrating that hierarchical kernel regression enables continuous, differentiable, and scalable SDF representation; (2) introducing a theoretically grounded and practically effective mechanism for end-to-end uncertainty propagation; and (3) empirically validating that such uncertainty is both trustworthy and actionable for motion planning under uncertainty.
Future Directions
Open research avenues include further scaling via distributed or GPU-accelerated BHM/GP pipelines, richer active learning for SDF surface sampling, integration with neural SDF models for hybrid representations that combine data efficiency with expressivity, and extension to dynamic scene mapping or non-Euclidean environments.
Conclusion
Kernel-SDF provides an integrated, efficient, and open-source framework for SDF estimation in robotic systems operating under uncertainty. Through careful algorithmic and engineering contributions, it achieves a unique combination of fast, differentiable, uncertainty-aware SDF/gradient predictions with practical robustness and theoretical soundness, filling a critical gap in current robotics perception and mapping pipelines.
Reference: "Kernel-SDF: An Open-Source Library for Real-Time Signed Distance Function Estimation using Kernel Regression" (2603.29227)