- The paper introduces a closed-loop ISCC framework that jointly optimizes sensing, communication, and control to minimize trajectory tracking error.
- It details a novel SCA algorithm that efficiently handles nonconvex resource allocation and guarantees mean-square system stability under FBL constraints.
- Numerical results demonstrate a reduction to 17.37% of GNSS baseline error, confirming robust performance in realistic low-altitude wireless environments.
Closed-Loop Integrated Sensing, Communication, and Control for Efficient Drone Flight
Introduction and Motivation
This paper presents an integrated sensing-communication-control (ISCC) closed-loop approach for precise drone trajectory tracking over low-altitude wireless networks (LAWN), targeting the interdependent dynamics among sensing, communication, and control under realistic resource constraints and stochastic errors (2603.29220). Traditional approaches typically decouple these subsystems, but for LAWN scenarios—characterized by high dynamism, fading channels, and finite resource budgets—such separation leads to persistent tracking errors and instability. The work directly models and optimizes the full sensing-communication-control (SCC) feedback chain, explicitly handling ISAC-based sensing errors, finite blocklength (FBL) communication-induced packet drops, and their joint effect on closed-loop stability and performance.
ISCC System Model and Sensing-Centric State Estimation
The ISCC system architecture considered comprises a ground base station (GBS) with an ISAC transceiver, responsible for real-time drone state estimation and control command generation. The drone becomes both the actuator and the ISAC sensing target. The time-frequency resource pool is shared among sensing, control signaling, and data communication, parameterized by resource fractions αsen, αctrl, and αcomm.
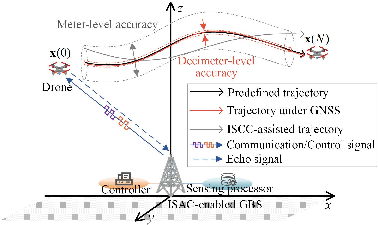
Figure 1: Illustration of ISCC-based drone trajectory tracking.
Each control iteration involves ISAC-based state observation (with waveform resources specified by αsen), control computation, and transmission of commands under FBL constraints (αctrl). The closed-loop operation (Figure 2) tightly integrates estimation and control signaling, with the FBL regime introducing non-negligible control command packet losses.
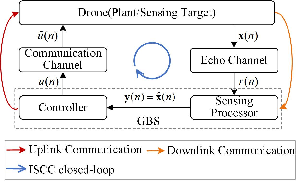
Figure 2: ISAC-enabled ISCC closed-loop operation showing the feedback architecture.
The drone's state is estimated via hybrid range-angle-Doppler processing from the ISAC echo, with performance characterized through CRLB analysis. The PEB and VEB, which quantify ultimate achievable accuracy, are functions of the ISAC resource allocation and SNR, with diminishing returns beyond a certain αsen.
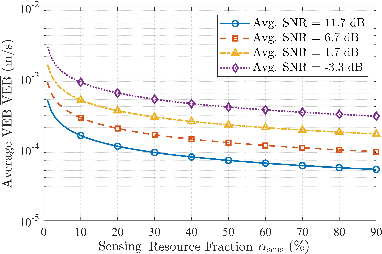
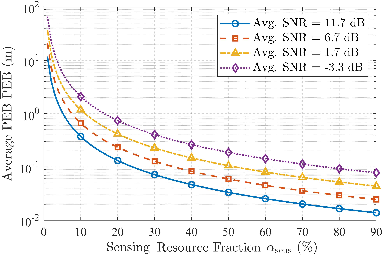
Figure 4: Average VEB and PEB versus sensing resource fraction αsen across SNR levels.
Communication and Control under FBL Constraints
Control commands are sent using OFDM symbols subject to FBL reliability constraints, leading to random command packet drop modeled as a Bernoulli process. The closed-loop state evolution is captured as a Markov jump-linear system, with the spectral radius of the state covariance transition matrix, ρ(M), governing mean-square stability. Importantly, the control resource fraction, αctrl, directly determines the critical packet loss threshold for stability.
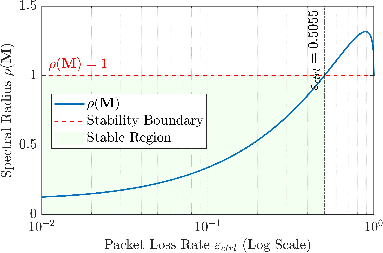
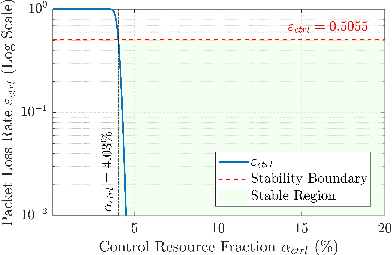
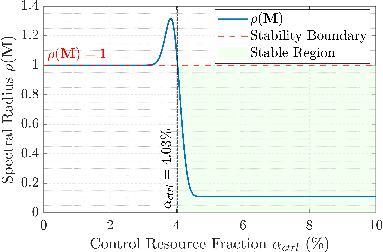
Figure 6: (a) Spectral radius ρ(M) versus αctrl0; (b) αctrl1 versus αctrl2; (c) αctrl3 versus αctrl4.
Theoretical derivations yield a lower bound on αctrl5 to maintain closed-loop stability. Once above this threshold, system performance becomes dominated by the sensing dimension, as control-induced unreliability transitions from being the limiting factor to a near-negligible effect.
Resource Allocation for Tracking Error Minimization
The key contribution is the joint optimization of αctrl6 to minimize average trajectory tracking error, subject to stability (αctrl7), minimum data rate, and rate-cost conditions reflecting LQG performance requirements. The problem is highly nonconvex due to the intertwined resource-performance-stability dependencies and the FBL-induced nonlinearities.
To address this, a successive convex approximation (SCA) algorithm is developed, exploiting the monotonicity and sparseness of the feasible region, where mean-square stability can be recast as a linear constraint in αctrl8. At each iteration, the dominant nonlinearities are linearized around the current operating point, reducing runtime complexity dramatically compared to global search or metaheuristics.
Numerical Results and System-Level Insights
Simulations are conducted under realistic LAWN channel and system parameters, with metrics averaged over random 3D flight trajectories to ensure generality.
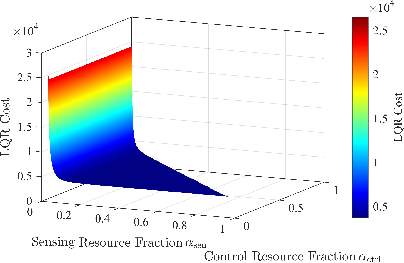
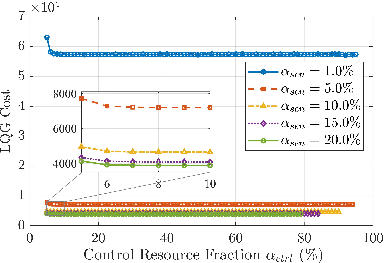
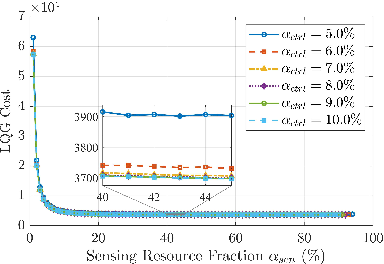
Figure 3: LQG cost dependence on αctrl9 and αcomm0, showing control resource thresholding and sensing-dominated performance.
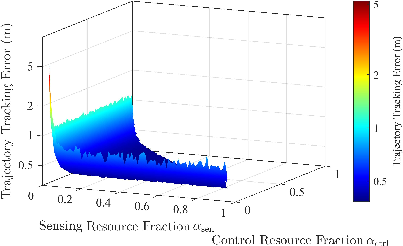
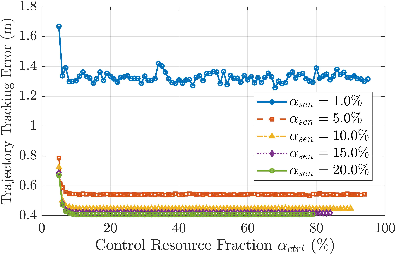
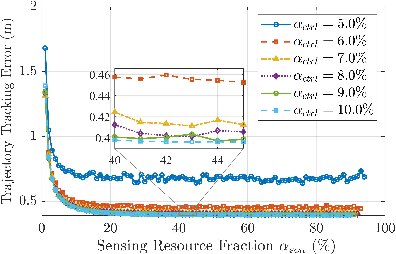
Figure 5: Trajectory tracking error surface as a function of αcomm1 and αcomm2.
Key findings include:
- Closed-loop stability is predominantly determined by αcomm3; once above threshold, additional control resources yield negligible gains.
- Tracking accuracy scales nearly linearly with PEB, confirming that ISAC sensing is the performance bottleneck in the stable region.
- There is a strong resource competition between data communication and SCC functions—excessive data rate demands sharply degrade both sensing accuracy and trajectory control via resource encroachment.
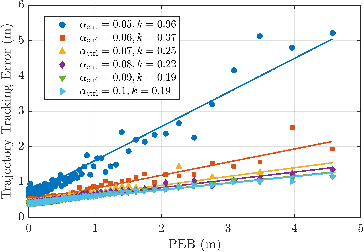
Figure 7: Average trajectory error plotted against PEB for different αcomm4, highlighting the attenuation of sensing errors in closed-loop operation.
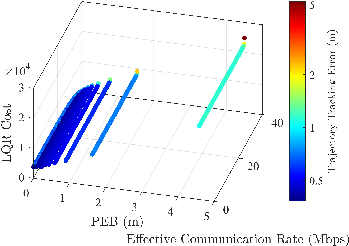
Figure 8: Coupling among sensing error, communication rate, LQG cost, and overall trajectory error.
The SCA method achieves tracking error nearly identical to grid search or evolutionary optimization, but at orders-of-magnitude lower computational cost (68.6s vs 10,000s for grid search).
Comparison with Benchmark Control Strategies
The ISCC closed-loop system is benchmarked against:
- Open-loop (no feedback) control,
- GNSS-based feedback (with typical error specs),
- ISCC design ignoring control packet loss.
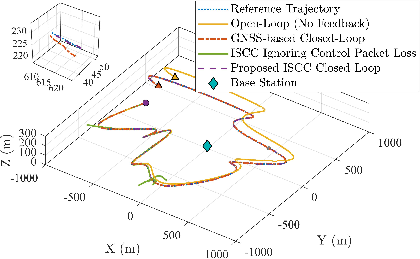
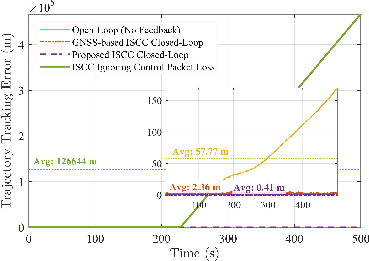
Figure 9: (a) 3D flight trajectories for different control strategies; (b) time-evolution of tracking error.
Results demonstrate that neglecting FBL-induced command drops—as done in much contemporary ISCC literature—can produce unbounded trajectory divergence due to violated stability. The proposed closed-loop ISCC achieves a mean tracking error of 0.41 m, reducing error to 17.37% of the GNSS feedback baseline and robustly avoiding divergence under FBL constraints.
Practical and Theoretical Implications
The paper analytically and empirically confirms that:
- ISCC system stability is fundamentally governed by command link reliability (and thus, αcomm5).
- Once stability is established, ultimate tracking accuracy is sensing-limited.
- Neglecting closed-loop modeling of stochastic command packet loss can result in catastrophic system performance due to loss of mean-square stability.
For LAWN and general networked autonomous systems, these findings formalize the necessity of explicit ISCC cross-layer co-design and joint resource allocation. Moreover, the results quantitatively inform the design tradeoff: communication data rate ambitions must be balanced against SCC requirements for safety and precision.
Conclusion
This work rigorously characterizes and optimizes the integration of sensing, communication, and control for drone flight over LAWN. By unifying detailed closed-loop modeling of ISAC-based state estimation, FBL stochastic command delivery, and resource-constrained performance, the paper provides a practical methodology for robust, high-precision trajectory control.
The insights and methods are expected to directly influence future cross-layer ISCC frameworks for networked autonomy, 6G-enabled aerial systems, and beyond, where ultra-reliable low-latency requirements are critical yet must be handled in the presence of limited resources and non-ideal physical layers. Future developments may extend these concepts to multi-agent networks, distributed control, and reinforcement learning under ISCC-aware constraints.