- The paper introduces a sparsity-regularized transformer-based VAE that disentangles system parameters without predefined candidate functions.
- It leverages causal representation learning to enforce local state-dependent causal relations, validated across multiple synthetic environments.
- The methodology achieves robust identifiability, outperforming baselines and offering insights for improved dynamical system modeling.
Disentangling Dynamical Systems: Causal Representation Learning Meets Local Sparse Attention
Abstract and Introduction
The paper "Disentangling Dynamical Systems: Causal Representation Learning Meets Local Sparse Attention" (2603.14483) introduces a methodology aimed at addressing the limitations of classical parametric system identification methods which demand predefined libraries of candidate functions informed by domain knowledge. The authors leverage causal representation learning to uncover disentangled representations of system parameters without imposing such structural assumptions. This approach is instantiated through a variational inference problem, employing a sparsity-regularized transformer architecture to reveal state-dependent causal structures. Empirical validation across multiple synthetic domains suggests that the proposed method consistently isolates system parameters more robustly than baseline methods.
Theory and Identifiability
The authors present a novel identifiability theorem that extends mechanism sparsity principles from non-linear ICA to dynamical systems. The primary contribution is the derivation of a graphical criterion specifying when system parameters can be uniquely disentangled from raw trajectory data, up to permutation and diffeomorphism. They argue that enforcing sparse causal relations between parameters and system components in the decoder provably disentangles the system parameter representation.
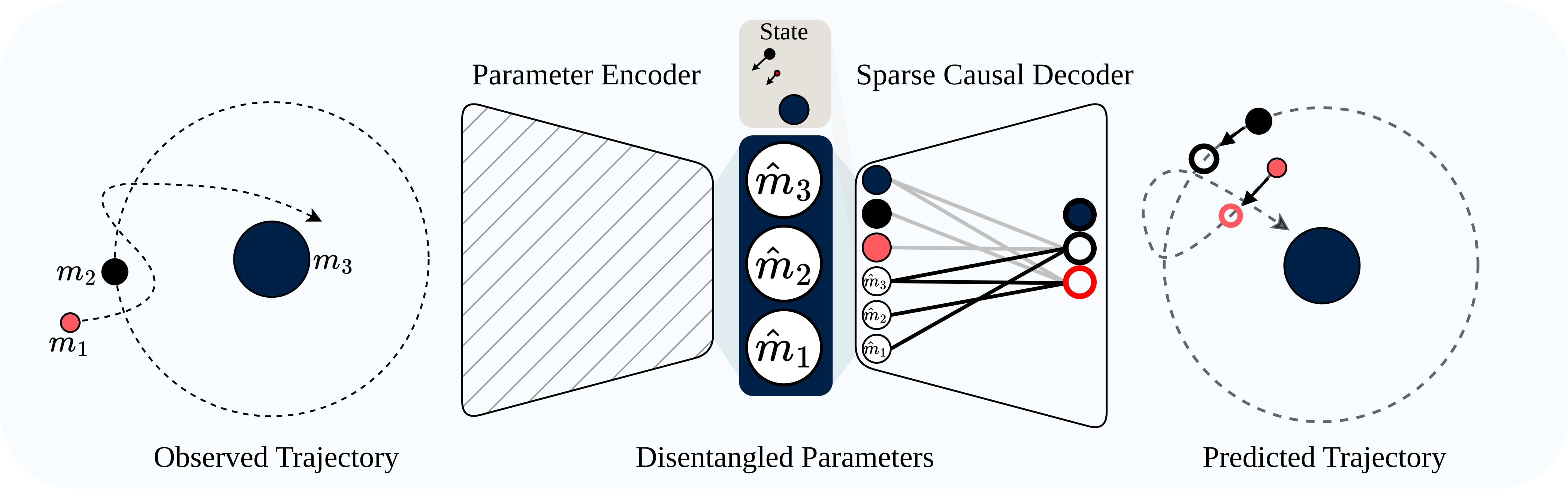
Figure 1: High-level overview of the developed theory. An observed trajectory (left) is encoded into a vector of latent system parameters (marked in dark blue). The developed theory shows that enforcing sparse causal relations between parameters and system components in the decoder (which performs one-step prediction) provably disentangles the system parameter representation.
Methodology
The paper operationalizes the identifiability theory through a practical algorithm based on a sparsity-regularized, VAE-style representation learning model. This model encodes observed trajectories into latent parameters and decodes them to reconstruct future trajectories. The key element is the use of a transformer architecture designed to learn local, state-dependent causal graphs that reflect the fine-grained causal influences between system components.
Empirical Validation
The authors validate their approach across four synthetic domains: Dual Particle, Local Particle, Springs, and Bounce. In these environments, different combinations of causal structures are incorporated, testing the limits of both global and local graphical criteria for disentanglement.
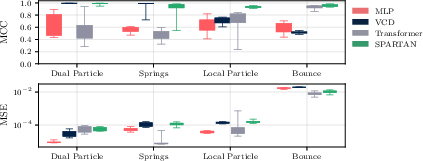
Figure 2: Comparison of disentanglement across the test environments, where an MCC of 1.0 represents perfect disentanglement. All trials are repeated over eight random seeds. Box plots display the minimum, lower quartile, upper quartile, and maximum values. The validation reconstruction loss is shown at the bottom, indicating that all models are approximately equiperformant in these environments. The VCD baseline, which learns static graphs, strongly disentangles in the first two environments, which satisfies the global graph criterion. In contrast, only SPARTAN, which learns state-dependent graphs, consistently disentangles in all environments.
The results confirm that enforcing local causal structure is often necessary for full identifiability, with the SPARTAN model outperforming other baselines in achieving disentangled representations.
Discussion and Implications
This paper contributes to the broader understanding of causal representation learning, linking it explicitly to system identification in dynamical systems. The practical implications are significant: robust identification of system parameters from trajectory data can lead to improved modeling and control in applications ranging from robotics to climate modeling. Theoretically, this work opens up new avenues in studying local causal structures and sparse attention mechanisms in neural networks.
Conclusion
The authors underscore that their work addresses fundamental limitations in classical system identification, providing a novel approach that relaxes structural assumptions and leverages causal dependencies in data. The insights gained from this research are poised to impact various fields requiring dynamical modeling, fostering future exploration into sparse causal models and expanding the scope of identifiability in unsupervised learning contexts.
In summary, the integration of causal representation learning with dynamical systems promises to enhance model interpretability and fidelity, positioning this methodology as a promising alternative to traditional approaches that rely heavily on domain knowledge.

