- The paper introduces GSNR, a novel method that leverages spectral graph theory to inject structure into the null-space of inverse imaging problems.
- It optimizes null-space coverage and predictability by projecting onto the graph Laplacian's smoothest modes, yielding substantial PSNR improvements.
- The framework integrates seamlessly with various solvers, accelerating convergence and reducing reconstruction artifacts in tasks like deblurring and super-resolution.
Graph Smooth Null-Space Representation for Inverse Problems: An Expert Overview
Introduction and Motivation
Inverse problems in imaging are fundamentally ill-posed, typically due to underdetermined measurement processes that render large null-spaces in sensing operators. Classical and contemporary priors such as total variation, sparsity, or learned denoisers (e.g., in Plug-and-Play frameworks) are traditionally leveraged to regularize the solution manifold. Critically, these conventional approaches do not explicitly constrain the null-space components of the solution, leading to potential bias and hallucination in the reconstructed image. This work introduces the Graph-Smooth Null-Space Representation (GSNR) as a principled mechanism to inject structure only into the unobservable null-space, leveraging graph signal processing (GSP) paradigms to regularize otherwise unconstrained solution directions.
The GSNR framework integrates spectral graph theory into null-space structure modeling. Given a linear inverse problem y=Hx∗+ω, the solution x naturally decomposes into components in Range(H⊤) and Null(H). The latter encodes degrees of freedom invisible to measurements. Prior work on null-space learning (e.g., NPN and Null-Space Networks) does not optimize the selection of null-space directions, often leading to poor coverage and predictability.
GSNR defines a graph Laplacian L capturing desired image geometry or smoothness. The null-restricted Laplacian is constructed as T=PnLPn, and its first p eigenvectors (with lowest eigenvalues) are used to build a highly structured, low-dimensional null-space projector S. This construction ensures both high coverage of plausible null-space variation and strong predictability from measurements.
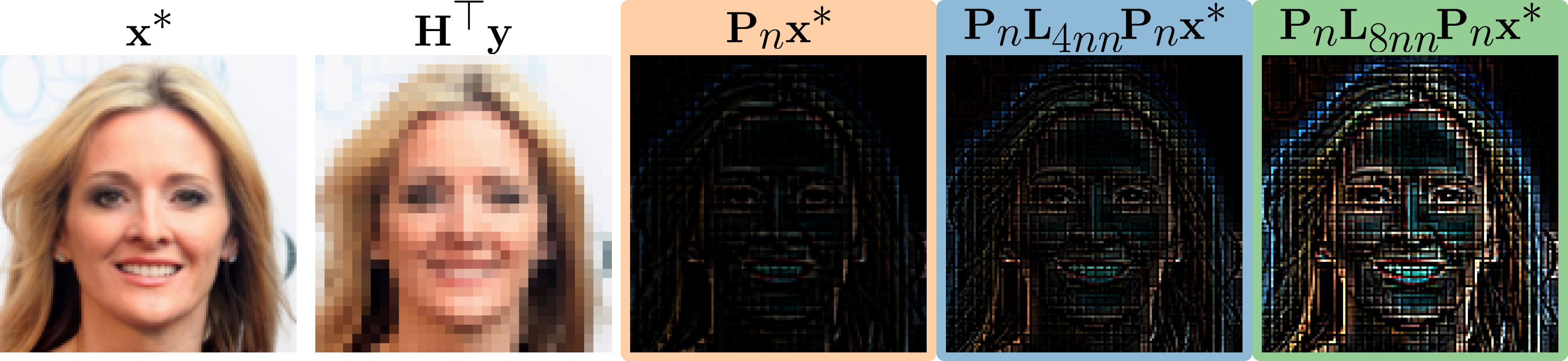
Figure 1: For image SR, GSNR identifies null-space projections that encode plausible edge and texture content invisible to the sensor.
Theoretical Contributions
The paper provides a rigorous theoretical foundation for null-space basis selection via two optimality criteria:
- Coverage: GSNR maximizes the fraction of null-space variance explained by the p graph-smoothest modes, for a GMRF prior. It is shown (Theorem 1) that coverage rises much more quickly with p using the Laplacian spectrum than using a geometry-free basis.
- Minimax optimality: The selected subspace is minimax-optimal over a graph-energy ellipsoid, guaranteeing minimal residual in the worst null-space direction.
Additionally, predictability of null-space modes from observed measurements is formally characterized. GSNR modes exhibit higher conditional R2 than generic bases, quantifying why they are more inferable and hence less likely to result in hallucination.
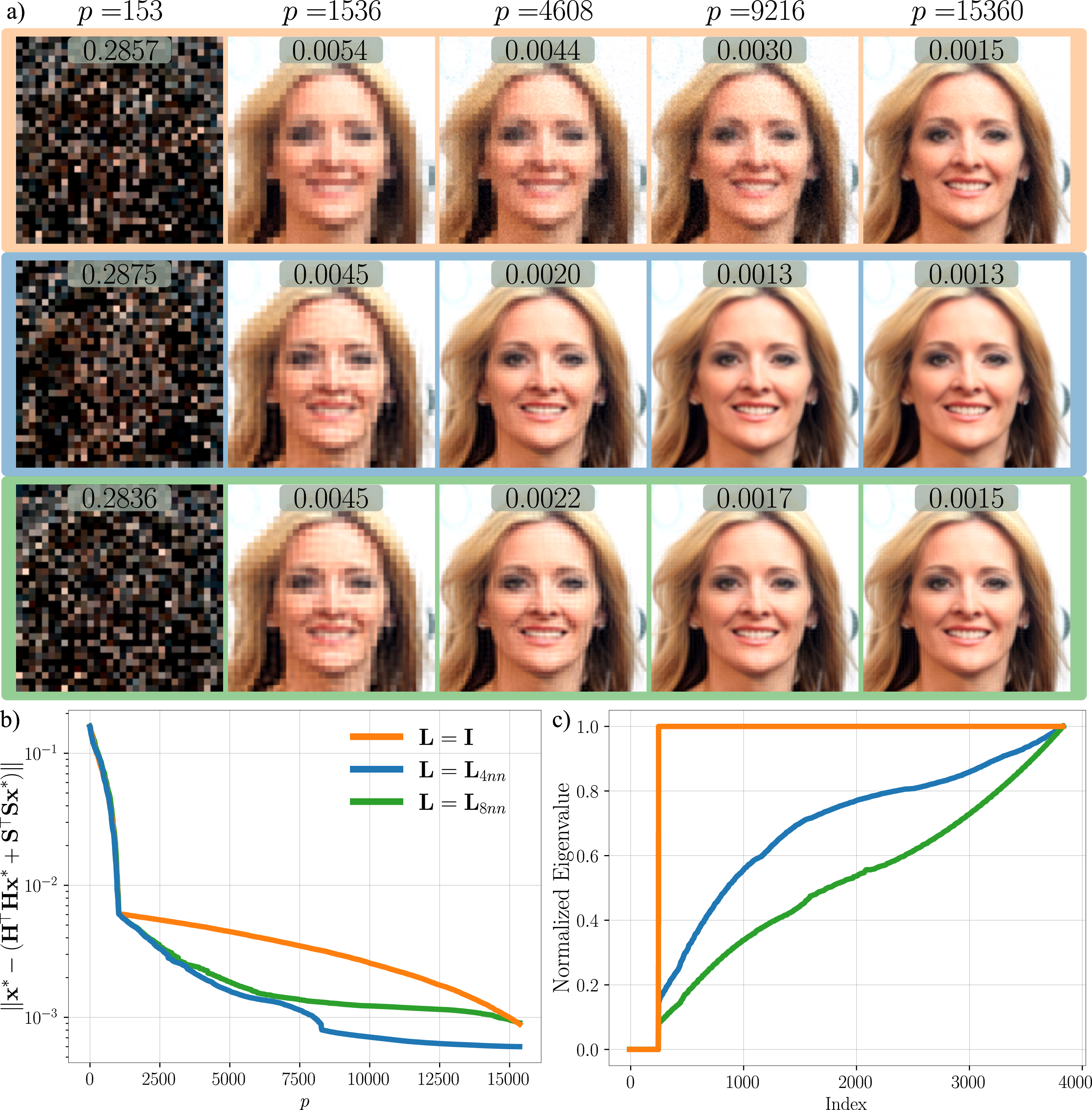
Figure 2: Coverage and spectral analysis reveal that GSNR-based modes capture null-space energy faster with increasing p than geometry-free bases.
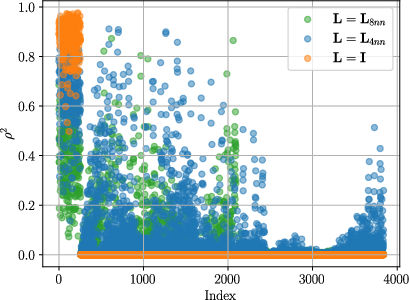
Figure 3: Per-mode predictability is dramatically increased for graph-based smooth null-space modes relative to non-structured directions.
GSNR-Regularized Inverse Problem Solvers
The GSNR penalty can be injected into a broad family of solvers, including variational regularization, PnP (with diverse denoisers), Deep Image Prior, and denoising diffusion solvers. The full loss includes a standard data-fidelity term, a measurement space prior, a GSNR-based null-projection term, and an optional graph-only penalty restricted to the null component.
This decomposition is solver-agnostic. In PnP PGD, for instance, GSNR yields an iteration-wise update in which the gradient includes both the data term and the null-laplacian regularizer. This improves both conditioning and convergence rates, as the added term acts precisely in the otherwise degenerate null-space.
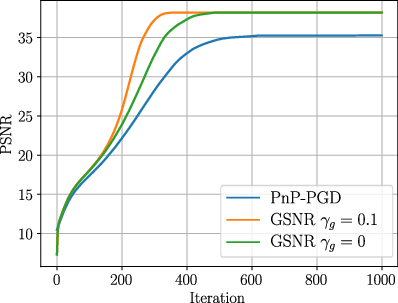
Figure 4: The addition of GSNR-based regularization substantially accelerates convergence and leads to superior fixed points in deblurring tasks.
Empirical Results and Benchmarks
The experimental suite covers image deblurring, compressed sensing, demosaicing, and super-resolution on both natural and SAR images, with extensive comparisons to plug-and-play, unrolling, deep decomposition, and end-to-end models.
Key numerical highlights:
- GSNR yields up to 4.3 dB PSNR improvement over vanilla variational or PnP baselines, and up to 1 dB over strong end-to-end models (e.g., DDN, NPN, and specialized unrolled solvers).
- The superiority holds invariant across denoiser backbones (DnCNN, DRUNet, wavelets), datasets (CelebA, Places365, DIV2K, SAR-like data), and null-space dimension choices.
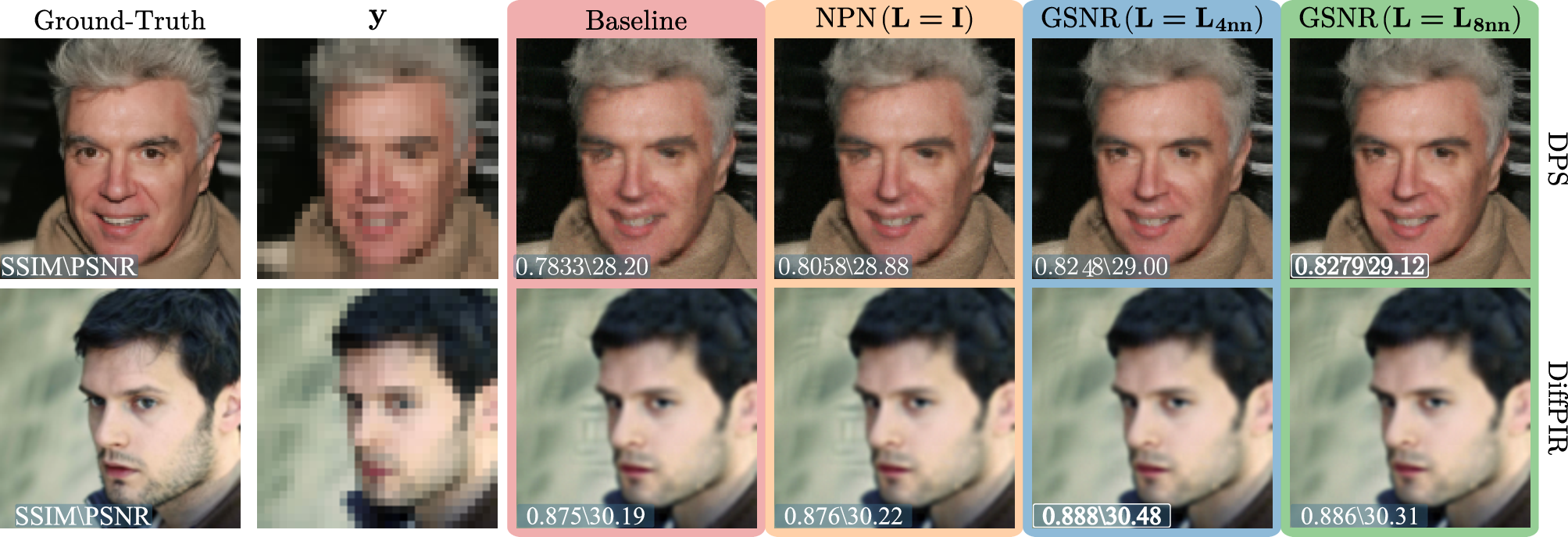
Figure 5: DM-based solvers (e.g., DPS, DiffPIR) benefit quantitatively and visually from GSNR constraints, exhibiting reduced aliasing and sharper features in SR.
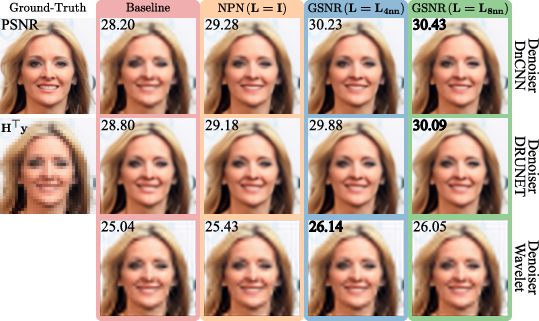
Figure 6: Plug-and-play reconstructions show systematic gains for GSNR-vs-NPN vs vanilla PnP across the full denoiser suite.
GSNR maintains its benefit under imperfect forward operator estimation, generalizes across datasets, and enables robust low-dimensional null-space regularization (as validated by ablation on the dimension parameter p and the Laplacian design).
Computational and Practical Considerations
While the core offline bottleneck in GSNR is the EVD of the null-restricted Laplacian T, this cost is amortized, with practical implementations relying on ARPACK or similar methods, and memory-efficient projections. Once computed, online costs are minimal and the framework is highly modular, easily integrated into new architectures. Empirical and theoretical analyses indicate rapid spectral concentration for standard grid and normalized Laplacians, supporting the practical use of small p.
Theoretical and Practical Implications
The main implication is that injecting explicit geometric structure only into the null-space resolves ambiguities neglected by prior work, improving both solution quality and algorithmic efficiency. The GSNR framework supplies operational, data-driven diagnostics for regularization strength and subspace size, which traditionally require manual tuning or are overlooked in PnP/RED pipelines. Furthermore, the theoretical principles established here extend to other sensing models, including non-optical and physics-inspired operators.
As plug-compatible regularization, the technique is agnostic to the sensing modality and regularization backbone—a universal improvement over range-only or geometry-free learned priors.
Limitations and Future Directions
The principal limitation is the requirement of an accurate forward operator. Extensions to robust GSNR under model mismatch, scalable approximation for high-res imaging (e.g., randomized or blockwise spectral methods), and adaptation to nonlinear/invertible sensing (e.g., phase retrieval, invertible neural networks) are outlined as active research directions. Learning data-adaptive graph Laplacians in an unsupervised or weakly supervised manner is also identified as a promising avenue for highly structured, semantically informed null-space regularization.
Conclusion
GSNR redefines how ambiguity is handled in imaging inverse problems, advocating for structured, graph-based constraints focused solely on the null-space. By maximizing spectral coverage and predictability, the methodology outperforms prior regularization strategies on ill-posed inverse tasks, while remaining universally compatible with modern learned solvers.
The approach is theoretically principled, empirically validated on difficult real-world tasks, algorithmically efficient, and has clear extensions toward fully generative, data-driven null-space modeling (2602.20328).

